
Le G.P.S. (7) – Les interfaces
(Document réalisé en 2016). Document faisant suite à Principe du positionnement
- Le protocole NMEA
- Les trames émetteurs
- Les trames requêtes
- La norme EIA-422
- Le protocole ARINC-429
- Autres liaisons
Lorsque le récepteur G.P.S. doit être couplé à d’autres équipements tels que ordinateurs, traceurs de route, système de navigation, etc… il doit utiliser une interface pour transmettre à ces équipements les données calculées. Plusieurs modes de communications existent, citons parmi eux deux protocoles fréquemment employés :
- le protocole NMEA
- le protocole ARINC-429
Le protocole NMEA
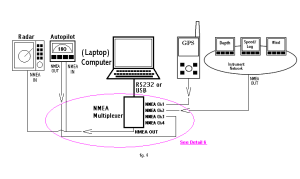
La norme NMEA 0183 (National Marine Electronics Association) est fréquemment employée dans les G.P.S. devant communiquer avec des équipements marins. Toutefois, elle est très répandue et peut également être disponible sur une grande variété d’équipements terrestres.
La norme NMEA 0183 utilise une communication série pour transmettre une trame à un ou plusieurs équipements.
Cette communication série doit être conforme à la norme EIA-422A (La norme EIA-422A est couramment appelée RS-422A. Toutefois une liaison RS-232 fonctionne correctement si la distance câble – ordinateur est courte. Dans ce cas l’ordinateur est le seul équipement raccordable à l’interface NMEA).
La liaison série doit être configurée ainsi :
- Vitesse : 4800 Bauds.
- Bits de données : 8 (bit 7 à 0).
- Bit de stop : 1
- Parité : sans
- Handshake : sans.
Les trames NMEA
 Toutes les trames sont transmises sous la forme de caractères ASCII imprimables plus deux caractères invisibles, le retour chariot [CR] et le retour ligne [LF].
Toutes les trames sont transmises sous la forme de caractères ASCII imprimables plus deux caractères invisibles, le retour chariot [CR] et le retour ligne [LF].
Chaque trame commence par le caractère « $ » et se termine par la séquence [CR][LF]. Il existe trois types de trames :
- Trames émetteur
- Trames propriétaires
- Trames requêtes
Les trames émetteurs
Le format général d’une trame émetteur est :
$eettt,d1,d2,d3…dn,[CR][LF]
-
- Les 2 caractères suivant le « $ » (ee) permettent d’identifier le type de source.
- Les 3 caractères suivants (ttt) permettent d’identifier le type de trame.
- Les caractères suivants (d1,d2,… dn) expriment les données transmises. Le séparateur est la virgule.
- Les données sont suivies éventuellement par une somme de contrôle.
- La trame se termine par les caractères retour chariot et retour ligne.
Les données transmises dépendent du type de trame émise.
Exemple :
$HCHDM,238,M[CR][LF]
- HC : indique que la source est le compas magnétique.
- HDM : indique que la donnée transmise est le cap magnétique
- 238 : indique que le cap magnétique suivi est 238°
- M : indique que la donnée transmise est magnétique (cap).
Une trame peut contenir jusqu’à 80 caractères plus « $ » et [CR][LF].
Si une donnée n’est pas disponible elle est omise; cependant les séparateurs (virgules) sont transmises.
La somme de contrôle est constituée d’un « * » suivie de 2 digits hexadécimaux par un OU exclusif de tous les caractères de la trame. Les caractères « $ » et « * » ne sont pas compris dans l’opération.
Les trames propriétaires
La norme permet aux constructeurs de définir leurs propres trames…
Les trames commencent par les caractères « $P » suivis des champs définis par le constructeur.
Les trames requêtes
Les trames requêtes permettent à un équipement récepteur de demander à un équipement émetteur l’envoi de trames particulières.
Le format général est :
$eerrQ,ppp,[CR][LF]
- Les 2 caractères suivant le « $ » (ee) indiquent la source de la requête.
- Les 2 caractères suivants (rr) indiquent l’équipement auquel s’adresse la requête; suivi toujours du caractère « Q » définissant la trame comme étant une requête.
- Les 3 caractères suivants (ppp) définissent la trame demandée dans la requête.
- La trame se termine par les caractères retour chariot et retour ligne.
Exemple :
$CCGPQ,GLL[CR][LF]
- CC : indique que la source de la requête est un ordinateur.
- GP : indique que l’équipement à qui est adressée la requête est le GPS.
- Q : confirme que la trame est une requête.
- GLL : est le trigramme de la donnée souhaitée (Lat. / Long. GPS).
L’équipement questionné émet la trame demandée toute les secondes tant qu’une nouvelle trame requête n’est pas reçue.
La norme EIA-422
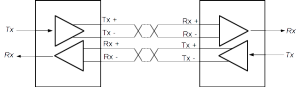
La liaison EIA-422A est une liaison série asynchrone différentielle. La transmission différentielle utilise quatre lignes pour transmettre et recevoir les signaux; elle est moins sujette au bruit et peut se faire sur de plus grandes distances de transmission que la norme RS232. Les quatre lignes sont constituées de deux paires torsadées blindées.
-
- Chaque transmetteur peut être raccordé à 10 récepteurs.
- La distance maximum de ligne est de 4000 pieds ( mètres).
- La vitesse maximale de transmission est de 10 Mbits/s.
- La ligne de transmission doit être bouclée sur une impédance terminale.
Le protocole ARINC-429
ARINC 429 (Aeronautical Radio INCorporated) est une norme pour l’aéronautique qui décrit à la fois une architecture, une interface électrique et un protocole pour véhiculer des données numériques. Au début du XXème siècle, ARINC 429 est le bus informatique le plus répandu sur les systèmes avioniques complexes.
Couche physique

ARINC 429 décrit un bus de données série unidirectionnel standard (simplex).
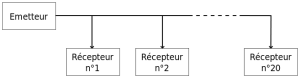
La norme impose également qu’il n’y ait qu’un seul émetteur par bus. Le nombre de récepteurs peut lui aller jusqu’à 203.
La connexion est réalisée par l’intermédiaire d’une paire torsadée blindée composée de 2 brins (ou lignes) « A » et « B ».
Le transfert des données est réalisé en différentiel entre les 2 lignes de la paire.
L’impédance de l’émetteur doit être maintenue en permanence à 75 ± 5 Ω quel que soit le niveau HIGH, LOW ou NULL, divisée de manière égale entre les 2 lignes de la paire. Cette valeur a été choisie pour être approximativement égale à l’impédance caractéristique de la paire blindée.
La résistance de chaque récepteur, entre les 2 lignes (« A » et « B ») et mais aussi entre chacune des lignes et la masse, doit être maintenue supérieure à 12 kΩ. Idem pour la capacitance, qui doit être inférieure à 50 pF entre les 2 lignes, mais aussi entre chacune des lignes et la masse.
La résistance totale des récepteurs (jusqu’à 20) mis en parallèle doit rester supérieure à 8 kΩ.
Il existe 2 vitesses de transmission 12,5 kbit/s et 100 kbit/s. Pour chacune de ces vitesses, la norme impose des temps caractéristiques.
La couche physique
Le bus utilise une paire torsadée blindée, d’impédance caractéristique de 78 Ω. Le blindage doit être relié à la masse à chaque extrémité ainsi qu’à chaque connexion tout au long du bus.
L’impédance de sortie de l’émetteur doit être de 75 Ω ± 5 Ω équilibrée entre les deux conducteurs.
L’impédance d’entrée des récepteurs doit être supérieure à 8 kΩ. L’impédance entre chaque ligne et la masse doit être supérieure à 12 kΩ. La capacitance doit être inférieure à 50 pF entre les deux lignes et entre les deux lignes et la masse.
La longueur maximum de la ligne n’est pas spécifiée; elle est dépendante du nombre de récepteurs…
L’encodage utilisé est de type bipolaire avec retour à 0.
Les trois niveaux utilisés pour l’encodage entre les 2 brins (A et B) de la paire blindée sont :
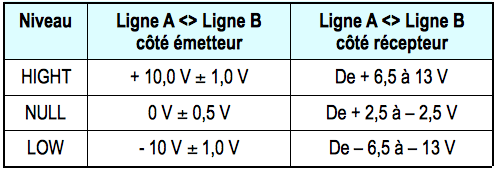
Lorsque l’émetteur ne transmet rien il se place à l’état NULL.
Il existe 2 vitesses de transmission 12,5 kbit/s et 100 kbit/s. Pour chacune de ces vitesses, la norme impose des temps caractéristiques :

La couche liaison de données
Les données sont émises dans des mots de 32 bits.

Mot ARINC-429
Le bit 32 est le bit de parité.
Les bit 30 & 31 sont la matrice de signe ou de statuts. La signification dépend du type de donnée. Les bits 11 à 29 expriment la donnée transmise.
Les bits 9 et 10 (SDI) indique soit le destinataire de la donnée (bus à plusieurs récepteurs), soit indique quel sous-système de l’émetteur a transmis la donnée.
Les bits 1 à 8 indiquent le label correspondant au type de donnée transmise. Selon le label, le récepteur déduit le décodage à appliquer aux données reçues.
La transmission des bits se fait dans l’ordre suivant :
- l’octet du label est transmis en premier, en commençant par le bit de poids fort.
- Les autres bits sont envoyés tels quels, en commençant par le bit de poids faible.
Ce qui donne le mot suivant :
8, 7, 6, 5, 4, 3, 2, 1, 9, 10, 11, 12, …, 30, 31, 32
Les données peuvent être transmises sous différents formats :
- BCD
- BNR
- DSC
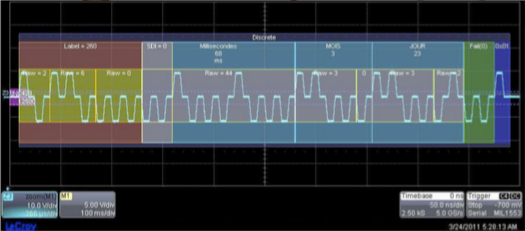
Mot ARINC-429 vu à l’oscilloscope
Le label est l’identifiant de la donnée transmise. Codé sur 8 bits, il peut donc prendre 256 valeurs différentes. La spécification ARINC-429A définit un certain nombre de labels standards. Citons en particulier pour le GPS :
- 010 (Hex) : Latitude de la position actuelle
- 011 (Hex) : Longitude de la position actuelle
- 076 (Hex) : Altitude au dessus/dessous de l’ellipsoïde de référence
- 077 (Hex) : Déviation Hor./Vert. GPS
- 375 (Hex) : Correction différentielle du GPS Mot A
- 376 (Hex) : Correction différentielle du GPS Mot B
Les trames sont constituées de plusieurs mots de 32 bits espacées par au moins 4 bits à l’état NULL.
L’ordre des mots dans les trames n’est pas spécifié.
Autres liaisons
De multiples protocoles de liaison sont apparus. Sans vouloir les décrire tous, citons en particulier :
- ARINC-629 : a été développé au départ pour le Boeing 777 et adopté en 1989.
Ce bus est un bus de données bidirectionnel pouvant accepter jusqu’à 120 terminaux et il supporte les multi-émetteurs. Il n’utilise pas de contrôleur de bus, chaque terminal gère de manière autonome son accès au bus. - MIL STD 1553 : ( MIL = Military Standard), est comme son nom l’indique, un standard militaire, qui a été développé par l’armée américaine pour l’avion militaire F-16 en 1973. Une deuxième version appelée MIL-STD-1553B a été développée en 1978 et est utilisée pour tous les systèmes avioniques militaires.
Ce bus est un bus série asynchrone qui permet les communications bidirectionnelles sur un bus simple. Les connections terminales ne sont pas autonomes, elles sont gérées par un contrôleur de bus. MIL-STD-1553 définit trois types de stations : un contrôleur de bus, les terminaux à distance et les moniteurs de bus. - ARINC 626 ou FDDI : Ce bus entre dans le concept de l’avionique nouvelle ou avionique modulaire intégrée (AMI). Ses spécifications sont adaptées à partir du protocole FDDI qui était largement utilisé en informatique pour les épines dorsales (backbones) des réseaux locaux.
L’ARINC 636 est un bus point à point spécialement adapté à la fibre optique sur un double anneau en sens inverse pouvant supporter jusqu’à 500 stations. - AFDX : il est principalement un sous-ensemble de l’ARINC 664 et a été développé par Rockwell Collins pour Airbus. L’ARINC 664 est une norme pour l’adaptation des normes du réseau Internet (ethernet, protocoles IP, UDP …) pour une utilisation avionique.
Ce bus entre aussi dans le concept de l’avionique nouvelle et est utilisé dans l’Airbus A380 . Ce bus est récent, l’accord pour l’étude de l’Airbus A380 ne datant que de 1997. Il est basé sur le concept de l’Ethernet duplex commuté comme son nom complet l’indique : Avionics full Duplex Switched Ethernet.
L’Ethernet classique n’a pas été jugé intéressant pour une application temps réel principalement à cause des collisions, conduisant à un délai d’accès au réseau non-borné. L’intérêt d’utiliser un commutateur Ethernet réside alors dans le fait que l’on peut contrôler les collisions voire les éliminer totalement lors de la phase de la configuration du réseau, garantissant ainsi un délai d’accès au réseau borné. - NMEA 2000 : est un standard de réseau de communication électronique conçu spécialement pour les navires de plaisance, selon une norme industrielle publiée par la National Marine Electronics Association (NMEA). Il a pour ambition de répondre à de nombreux besoins, nés de l’accroissement considérable des appareils électroniques embarqués, de la généralisation des ordinateurs et des afficheurs multifonctions dotés d’applications de contrôle et de navigation de plus en plus sophistiquées. Il a également pour but d’assurer l’interconnexion d’appareils de fabricants et de marques diverses, permettant aux constructeurs de bateaux comme aux utilisateurs une grande liberté dans le choix de leurs instruments de navigation. Basé sur le protocole Controller Area Network (ou CAN bus) développé par Bosch et Intel, utilisé depuis plusieurs décennies dans l’industrie automobile et l’automatisme, il permet la communication de tous les appareils répondant à la norme NMEA2000® Certified, quelqu’en soit le fabricant, par simple connexion sur le réseau. Conçu pour fonctionner dans des environnements rigoureux, NMEA2000 utilise le principe d’une paire de fils différentiels dans un câblage standardisé, choisi pour son insensibilité aux parasites et permettant jusqu’à 200 mètres de longueur en milieux perturbés.
Précédent : Principe du positionnement – Suivant : Le G.P.S. différentiel