
Le G.P.S. (6) – Principe du positionnement
(Document réalisé en 2015). Document faisant suite à Les récepteurs G.P.S.
- Pseudo-distance
- Horloge locale
- Equation de navigation
- La relativité
- Conversion des coordonnées
- Coordonnées géocentriques
- La précision
- UERE
- GDOP
- Erreur de navigation
Avertissement : ce chapitre fait appel a des notions de mathématiques avancées. Les lecteurs qui ne posséderaient pas ces connaissances pourront passer ce chapitre ou ne retenir que les informations qui leurs seraient compréhensibles.
 La position du récepteur est déduite de la mesure de la distance qui sépare chaque satellite du récepteur.
La position du récepteur est déduite de la mesure de la distance qui sépare chaque satellite du récepteur.
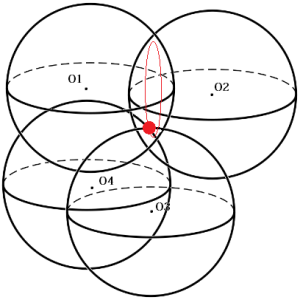
Supposons connues les distances D1, D2, D3 de 3 satellites. On peut en déduire que le récepteur se trouve à l’intersection des 3 sphères de rayon D1, D2 et D3 centrées respectivement sur les 3 satellites O1, O2, O3.
Or l’intersection de deux sphères donne un cercle et l’intersection de ce cercle avec la 3ème sphère donne 2 points. Le doute est aisé à lever car un de ces points se trouve au dessus de l’altitude des satellites et l’autre (le bon) se trouve en dessous.
Enfin l’intersection de 4 sphères lève complètement le doute : il ne reste qu’un seul point d’intersection des 4 sphères.
Pseudo-distance
Il s’agit donc de mesurer la distance séparant le récepteur des satellites. Celle-ci est calculée à partir du temps de propagation du signal porteur.
Connaissant l’heure exacte de production d’une transition déterminée du signal satellite, il suffit de lire l’heure d’arrivée de cette transition sur l’horloge du récepteur pour calculer le temps de propagation par différence. En multipliant ce temps par la vitesse de la lumière c, on obtient une valeur de distance qui est traditionnellement appelée « pseudo-distance » dans la terminologie G.P.S.
Chaque satellite émettant en permanence sa position et l’heure de ses émissions, on peut en déduire la distance satellite – récepteur :
![\[D_i = c(t_r-t^0_i) = \sqrt{(X_i-U_x)^2 + (Y_i-U_y)^2+(Z_i-U_z)^2}\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-253e7552f0e5f9bd555a06c17f9c6a26_l3.png "Rendered by QuickLaTeX.com")
Calcul de la pseudo-distance satellite – récepteur
Avec :
 : la pseudo-distance entre le récepteur et le satellite.
: la pseudo-distance entre le récepteur et le satellite.
 : la vitesse de la lumière.
: la vitesse de la lumière.
 : le temps G.P.S. où le signal est émis du satellite.
: le temps G.P.S. où le signal est émis du satellite.
 : le temps G.P.S. où le signal émis à est reçu.
: le temps G.P.S. où le signal émis à est reçu.
 : les coordonnées connues du satellite Si à l’instant
: les coordonnées connues du satellite Si à l’instant
 : les coordonnées inconnues du récepteur de l’utilisateur.
: les coordonnées inconnues du récepteur de l’utilisateur.
Remarque :  sont les coordonnées cartésiennes géocentriques.
sont les coordonnées cartésiennes géocentriques.
À partir de l’équation précédente on obtient :
![\[(X_i-U_x)^2 + (Y_i-U_y)^2 + (Z_i-U_z)^2 = D_i^2\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-812a3b232a22f1d27595f294dcfbbb51_l3.png "Rendered by QuickLaTeX.com")
Calcul de la pseudo-distance
 L’équation ci-dessus est donc une équation à 3 inconnues. Pour la résoudre, il faut disposer de 2 autres équations du même type associées à 2 autres satellites.
L’équation ci-dessus est donc une équation à 3 inconnues. Pour la résoudre, il faut disposer de 2 autres équations du même type associées à 2 autres satellites.
Horloge locale
La solution précédente suppose que l’utilisateur dispose d’une horloge locale parfaite, ce qui n’est évidemment jamais le cas. Les satellites embarquent une référence de temps précise et surtout stabilisée (horloge atomique). Elles sont corrigées par le segment contrôle afin de rattraper les éventuelles dérives.
Les récepteurs quant à eux sont équipés d’un simple oscillateur à quartz compensé en température (TCXO), principalement pour des raisons de coût et d’encombrement. L’horloge du récepteur n’est donc pas à priori synchronisée avec le temps G.P.S. Il y a de ce fait un offset de temps qui induit une erreur sur le calcul des distances satellites – récepteur. Dans les calculs précédents on parle donc de pseudo-distance.
L’ensemble des horloges de la constellation des satellites étant parfaitement synchronisé, l’offset de temps est donc le même entre le récepteur et tous les satellites; les pseudo-distances présentent donc le même offset au même instant. L’erreur peut donc être facilement calculée et corrigée.
Equation de navigation
Ainsi donc, le récepteur G.P.S. ne connait pas le temps G.P.S. exact. Il ne connaît que l’écart relatif par rapport aux satellites. Un quatrième satellite est nécessaire pour calculer la position exacte.
En développant, l’équation devient :
![\[(X_i^2+Y_I^2+Z_i^2)-2(X_iU_x+Y_iU_y+Z_iU_z-D_ic\Delta t)+(U_x^2+U_y^2+U_z^2-(c\Delta t)^2)=0\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-1e7a63a6291db968f394c58d65c0c0e1_l3.png "Rendered by QuickLaTeX.com")
Calcul de la distance satellite – récepteur
Avec :
 : l’offset de l’horloge interne du récepteur.
: l’offset de l’horloge interne du récepteur.
Il suffit donc d’appliquer cette équation à 4 satellites de la constellation. Dès lors, le nombre des inconnues passe à 4 et l’on aboutit à un système de 4 équations à 4 inconnues établies à partir des 4 satellites. Par transformations mathématiques (Gérard BODIN, Système GPS de positionnement par satellite- Ver. 1 , Techniques de l’Ingénieur , 2015), on on élimine les termes relatifs à et on obtient  .
.
Il ne reste plus qu’à transformer ces coordonnées géocentrées en coordonnées géographiques.
La relativité
Outre l’incertitude associée à l’horloge du récepteur, la relativité restreinte et la relativité générale interviennent de façon fondamentale.
La première implique que le temps ne s’écoule pas de la même façon dans le référentiel du satellite, parce que celui-ci possède une grande vitesse par rapport au référentiel du récepteur.
La seconde explique que la plus faible gravité au niveau des satellites engendre un écoulement du temps plus rapide que celui du récepteur.
Le système tient compte de ces deux effets relativistes dans la synchronisation des horloges. Par exemple les fréquences émises sont légèrement décalées (0,45 ppb, précisément 4,4645 10-10, ce qui correspond à un décalage de quelque 38,57 microsecondes par jour) pour être reçues au sol avec la valeur voulue. Sans cela l’erreur sur la mesure de la pseudo-distance serai de plus d’un kilomètre.
Conversion des coordonnées
Dans les expressions précédentes  sont exprimées en coordonnées géocentriques. Ce système n’est pas adapté aux pratiques de navigation modernes et nécessite donc une conversion en cordonnées géographiques, plus adaptées à la lecture de la carte. Le récepteur G.P.S. doit donc effectuer ces conversions. Certains d’entre-eux permettent à l’opérateur de choisir le système de coordonnées affiché.
sont exprimées en coordonnées géocentriques. Ce système n’est pas adapté aux pratiques de navigation modernes et nécessite donc une conversion en cordonnées géographiques, plus adaptées à la lecture de la carte. Le récepteur G.P.S. doit donc effectuer ces conversions. Certains d’entre-eux permettent à l’opérateur de choisir le système de coordonnées affiché.
Coordonnées géocentriques
Le système de coordonnées géocentriques n’est pas un système de coordonnées planaire basé sur une projection cartographique. C’est un système de coordonnées dans lequel la Terre est modélisée sous la forme d’une sphère ou d’un ellipsoïde dans un système XYZ (cartésien 3D), mesuré à partir du centre des masses de la Terre.
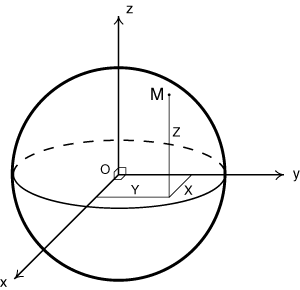
Remarque : le point M peut également se situer dans l’espace, au dessus de la surface de la terre. C’est le cas des aéronefs.
Les coordonnées d’un point M de la surface de la Terre peuvent être exprimées sous la forme de coordonnées cartésiennes géocentriques (x, y, z) prises dans un repère orthonormé dont l’origine est le centre des masses de la Terre, Oz l’axe de rotation de la Terre et xOy le plan de l’équateur. L’axe x pointe vers le méridien de Greenwich, l’axe z est confondu avec l’axe de rotation de la terre et l’axe y est normal au plan xOz.
Surface de référence
La détermination de points nécessite l’utilisation d’une surface de référence mathématiquement simple qui représente le mieux possible la forme de la Terre. Cette surface est l’ellipsoïde de révolution qui est une sphère aplatie aux pôles.
Il existe de nombreux ellipsoïdes représentant la Terre dont les dimensions varient de l’ordre de quelques centaines de mètres.
Le demi-grand axe de l’ellipsoïde a une valeur d’environ 6 370 km et le demi-petit axe une valeur d’environ 6 350 km.
Coordonnées géographiques

Les coordonnées géographiques d’un point M de la surface de la Terre sont la longitude  et la latitude
et la latitude  de la projection de M sur l’ellipsoïde suivant la normale et la distance algébrique h de Mo à M.
de la projection de M sur l’ellipsoïde suivant la normale et la distance algébrique h de Mo à M.
La longitude : c’est l’angle orienté entre le plan méridien origine et le plan méridien contenant le point M. Le méridien origine international est celui de Greenwich mais de nombreux systèmes utilisent d’autres méridiens origines (par exemple, celui de Paris en France).
La latitude : c’est l’angle orienté entre le plan de l’équateur et la normale à l’ellipsoïde passant par le point M.
La hauteur  : c’est la distance algébrique MoM entre le point M et l’ellipsoïde.
: c’est la distance algébrique MoM entre le point M et l’ellipsoïde.
La conversion
Les formules suivantes permettent la conversion coordonnées géocentriques → coordonnées géographiques (S. Lannuzel, Référentiels géodésiques – Coordonnées, 2000, http://www.shom.fr/fileadmin/data-www/MIP/DTI/HYDRO/Referentiels_geodesiques.pdf):
![\[\lambda = \arctan{\left(\frac{y}{x}\right)}\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-4342e06173ae60036da76404f449b9ac_l3.png "Rendered by QuickLaTeX.com")
Conversion de la longitude
![\[\varphi_n = \arctan{ \left(\frac{z+e^2 N_{n-1}sin(\varphi_{n-1})}{\sqrt{x^2+y^2}}\right)}\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-ead0043c54cf25a667d390344747a59c_l3.png "Rendered by QuickLaTeX.com")
Conversion de la latitude (version simplifiée)
Le passage  est compliqué car la grandeur N est fonction de la latitude. Avec la formule simplifiée (ci-dessus) la conversion est plus facile : trois itérations suffisent en moyenne pour obtenir une valeur de la latitude avec une convergence meilleure que le millimètre à partir de
est compliqué car la grandeur N est fonction de la latitude. Avec la formule simplifiée (ci-dessus) la conversion est plus facile : trois itérations suffisent en moyenne pour obtenir une valeur de la latitude avec une convergence meilleure que le millimètre à partir de  comme valeur de départ approchée.
comme valeur de départ approchée.

 : Grande normale
: Grande normale
: longitude géodésique,
: latitude géodésique,
: hauteur ellipsoïdale,
 : demi grand axe de l’ellipsoïde,
: demi grand axe de l’ellipsoïde,
 : excentricité de l’ellipsoïde
: excentricité de l’ellipsoïde
![\[ h = \frac{\sqrt{x^2+y^2}}{\cos{\varphi}}-N\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-34441b4c3352bd997eb28a8ab073f106_l3.png "Rendered by QuickLaTeX.com")
Conversion de la hauteur

Diagramme de conversion des coordonnées
La précision
La précision que l’on peut s’attendre à obtenir sur un positionnement par observations de corps célestes naturels ou artificiels dépend de deux facteurs indépendants, soit :
-
- de la précision avec laquelle on connaît la position de ces corps. Dans le cas du G.P.S. il s’agit de UERE (User Equivalent Range Error), une donnée calculée à partir du message de navigation de chaque satellite.
- des angles d’observation. C’est le facteur géométrique dont découle la notion de GDOP.
Le tableau ci-dessous dresse la synthèse des principales possibilités d’erreur et de leur valeur estimée.
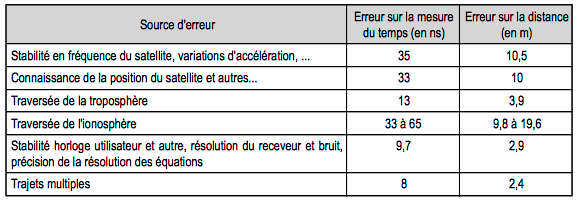
Principaux facteurs d’erreur
Note : en théorie l’incertitude de la mesure est égale à la somme des incertitudes. En pratique les erreurs se compensent plus ou moins permettant une précision jusqu’à 10 fois supérieure.
UERE
L’ UERE est un terme rassemblant différentes sources d’erreurs relatives à la mesure de la distance satellite – récepteur.
Ce sont :
Erreurs sur les orbites
Les lois de Kepler décrivent les mouvements des orbites planétaires. On peut les appliquer à un satellite en orbite autour de la terre en faisant l’hypothèse que la seule masse produisant une attraction est la terre.
Ce n’est, bien entendu, pas le cas en réalité :
- la Terre n’est pas une sphère parfaite et présente donc un champ de gravité non uniforme. Les modèles mathématiques actuels fournissent une assez bonne correction.
- Les autres corps du système solaire exercent leur propre champ gravitationnel qui ont une influence sur les satellites. Là également, ces effets sont assez facilement corrigés.
- Les satellites G.P.S. ne voyagent pas dans le vide parfait. Ils peuvent être exposés à des frottements sur les couches supérieures de l’atmosphère. Dans le système G.P.S. le phénomène est négligeable.
- Les satellites supportent la pression des radiations solaires. Ce phénomène n’est pratiquement pas modélisable et représente la plus grande source d’erreurs inconnues.
Malgré la transmission des éphémérides, les satellites G.P.S. ne sont pas en mesure de fournir toutes les données exactes permettant aux récepteurs d’annuler complètement ces effets indésirables.
Erreurs atmosphériques
Si les erreurs dues à la propagation des signaux G.P.S. dans l’ionosphère sont assez bien corrigées par l’emploi de deux fréquences (L1 et L2), la correction des erreurs dues à la traversée de la troposphère reposent sur des modèles. De l’exactitude de ces derniers dépend la précision des corrections apportées.
Effets de la relativité
Les erreurs du segment spatial
Les erreurs non intentionnelles introduites par les satellites sont principalement dues aux offsets des différentes horloges. La cause de ces erreurs réside principalement dans la manière dont sont introduites les corrections d’horloges par le segment contrôle.
Les données de chaque satellite observable sont collectées par les différentes stations de contrôle, puis acheminées à la station principale de Colorado Springs. A partir de ces données, les futurs paramètres à introduire dans les satellites sont élaborés, puis envoyés vers les différentes stations où elles sont émises vers les satellites.
Les délais nécessaires à ces opérations ainsi que les modèles mathématiques imparfaits apportent des dégradations similaires au S/A mais d’amplitudes plus faibles.
Les trajets multiples
Il s’agit d’un phénomène de propagation qui fait que les signaux radio atteignent l’antenne par deux ou plusieurs trajets. Les causes de ces trajets multiples comprennent la canalisation atmosphérique, la réflexion et réfraction ionosphérique, et la réflexion d’une nappe d’eau, de montagnes, d’arbres ou d’édifices.
La correction différentielle ne compense pas toutes les erreurs causées par les trajets multiples. Certaines précautions peuvent atténuer la sensibilité de l’antenne GPS à ces reflets de signaux, par exemple en s’éloignant des structures réfléchissantes comme les immeubles.
Un combiné récepteur/antenne haut de gamme pourra mieux rejeter les trajets multiples, alors qu’un dispositif moins dispendieux tolérera un plus grand nombre de trajets multiples.
Antennes G.P.S. réduisant les trajets multiples.
Le S/A.
Sans objet : le S/A est désactivé depuis le 2 mai 2000.
Le bruit des récepteurs

Même sans antenne branchée, un récepteur démodule un bruit de fond. Ce bruit de fond (bruit blanc, souffle…) est généré par le récepteur lui-même et il s’ajoute d’une part aux bruits parasites recueillis par l’antenne et d’autre part au signal utile qui dans le cas du G.P.S est complètement noyé.
Sauf cas très particulier, un récepteur est toujours relié à une antenne pour recevoir un signal particulier sur une fréquence donnée. En même temps que le signal utile, l’antenne fournit au récepteur une foule de signaux indésirables mais surtout du bruit de fond radioélectrique d’origine naturelle (venant de l’espace ou produit par les orages terrestres) ou généré par les activités humaines. Le niveau de ce bruit de fond est très variable en fonction de la saison, de la situation géographique de l’antenne et de son environnement immédiat.
Le bruit radioélectrique
Lorsqu’on raccorde une antenne à un récepteur, on se rend compte que, même en l’absence de signaux, le niveau du bruit de fond audible dans le haut-parleur ou le casque augmente de façon plus ou moins importante. Ce souffle, qui s’ajoute au bruit généré par le récepteur, est le bruit externe. Dans le cas des récepteurs G.P.S. le bruit de fond n’est pas audible mais perturbe la démodulation des signaux reçus des satellites.
Les signaux nuisibles externes au récepteur qui gênent le décodage des signaux peuvent être regroupés grossièrement en trois familles :
- brouillage : c’est le signal d’un émetteur voisin de la fréquence occupée, l’harmonique d’un émetteur commercial, le rayonnement indésirable du décodeur TV du voisin… ou un brouilleur militaire. Il occupe une fréquence ou une bande de fréquence restreinte et pourrait être identifié.
- parasite : crépitement correspondant à l’étincelle d’allumage d’un moteur à explosion mal antiparasité ou d’une clôture électrique, ou encore d’un amorçage aux bornes d’un isolateur défectueux… Les parasites sont souvent périodiques et couvrent une très large bande de fréquence. Leur amplitude décroît avec la fréquence, ils sont donc surtout audibles sur les bandes les plus basses. Les signaux G.P.S. sont peu parasités.
- bruit : souffle continu sur une bande de fréquence plus ou moins large. Il est provoqué par un très grand nombre de signaux survenant de façon aléatoire et que l’on ne peut isoler.
Les sources de bruit radioélectrique externes au récepteurs se classent dans deux catégories : origine naturelle et artificielle.
1) Sources naturelles de bruit
a) Origine terrestre :
Atmosphérique : ensemble de toutes les décharges électriques liées surtout aux centaines d’orages qui sévissent en permanence à la surface de la planète et en particulier des régions tropicales et équatoriales. Le spectre de fréquence de ces émetteurs à étincelles se situe principalement dans les VLF mais les harmoniques de ces variations brutales de potentiel s’étalent jusqu’aux VHF. L’amplitude de ces harmoniques décroit avec la fréquence, ce qui explique que le niveau de bruit dû à ce phénomène diminue fortement au delà de 10 MHz et devient négligeable au-dessus de 30 MHz si on le compare au niveau de bruit radioélectrique provoqué par les activités humaines. Le niveau de bruit varie en fonction de nombreux paramètres qui régissent également la propagation des ondes « utiles ».
Atmosphérique également est le bruit due à la vapeur d’eau et à l’oxygène en hyperfréquences, principalement aux alentours de 24 et 60 GHz.
Rayonnement du sol : comme tous les objets dont la température est supérieure au zéro absolu, le sol rayonne. Ce bruit est très faible si on le compare à celui des autres sources mais non négligeable pour certaines applications.
b) Origine extra-terrestre
- Solaire : en tant qu’étoile, le soleil est un puissant émetteur d’ondes électromagnétiques depuis les fréquences les plus basses jusqu’aux rayons gamma. Le niveau de bruit perçu à la surface de la Terre est généralement faible mais peut augmenter fortement lors des sursauts d’activité radioélectrique, principalement sur les fréquences supérieures à 20 MHz pendant des périodes pouvant dépasser plusieurs heures. Le bruit radioélectrique d’origine solaire varie bien entendu en fonction des rythmes habituels : journaliers, saisonniers mais aussi en fonction du cycle solaire.
- Lunaire : la Lune rayonne du bruit d’origine thermique comme n’importe quel objet.
- Galactique : la matière interstellaire (gaz) est le principal responsable du bruit galactique. Les millions d’étoiles qui peuplent notre galaxie, la Voie Lactée, sont autant de soleils et de générateurs de bruits radioélectriques mais leur éloignement fait que le niveau de bruit qui leur est imputé est très faible. Certaines de ces radiosources se distinguent particulièrement. Le niveau du bruit galactique est du même ordre de grandeur que le bruit d’origine artificiel rencontré dans une zone rurale calme.
- Cosmique ou cosmologique : bruit résiduel lié au Big-Bang et à l’expansion de l’univers. Très faible et provenant de toutes les directions, on peut considérer qu’il constitue la référence de bruit avec ses 2,7 °K.
2) Bruit radioélectrique lié à l’activité humaine
La plupart des appareils producteurs ou consommateurs d’électricité, reliés au réseau ou non, sont susceptibles de produire du bruit. L’allumage ou l’extinction d’une simple lampe à incandescence étant déjà audible dans un récepteur en modulation d’amplitude, que dire des alimentations à découpage, des lampes à basse consommation ou tubes fluorescents classiques, des moteurs électriques, des systèmes d’allumage des moteurs à explosion, des écrans, souris, claviers. d’ordinateurs. A ces sources s’ajoutent les systèmes de communication par courants porteurs en ligne (CPL) qui polluent les fréquences de 9 à 150 kHz et de 1,6 à 30 MHz
Le bruit naturel d’origine terrestre est pratiquement négligeable car il atteint des niveaux inférieurs à -40 dBμV/m au delà de 75 MHz et ce quelle que soit la saison.
Le niveau de bruit d’origine humaine dans une zone radioélectriquement polluée atteint des niveaux d’environ – 20 dBμV/m vers des fréquences voisines de L1 et L2.
Le bruit galactique atteint des niveaux moyens de – 32 dBμV/m pour des fréquences voisines de L1 et L2.
Niveaux des bruits externes
Avec :
- A : bruit naturel d’origine terrestre (atmosphérique) de nuit en été.
- A’ : bruit naturel d’origine terrestre (atmosphérique) de jour en hiver.
- I : niveau de bruit d’origine humaine en zone très polluée.
- I’ : niveau de bruit d’origine humaine en zone très éloignée d’activité humaine.
- G : Bruit galactique.
l’ UERE s’exprime comme la racine carrée de la somme des carrés de la valeur moyenne de chaque source d’erreur :
![\[\sigma_{UERE}=\sqrt{\sigma_{R1}^2+\sigma_{R2}^2+\dotsb+\sigma_{Rn}^2}\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-eaceb8296f5d126c40993a1cadc25512_l3.png "Rendered by QuickLaTeX.com")
Calcul de l’UERE.
Avec :
 en mètres
en mètres
GDOP
GDOP (Geometric Dilution Of Precision,) ce qui peut se traduire par : diminution de la précision d’origine géométrique.
C’est un nombre sans dimension qui dépend uniquement des situations relatives des satellites et de l’utilisateur et qui permet d’évaluer pour un instant donné l’erreur imputable à la géométrie du système.
![\[ GDOP=\sqrt{\sigma_x^2+\sigma_y^2+\sigma_z^2+\sigma_t^2}\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-d05f5d62096f89fe8720b79d347808fd_l3.png "Rendered by QuickLaTeX.com")
Calcul de la GDOP.
Où :
 est la covariance de la position selon l’axe X,
est la covariance de la position selon l’axe X, est la covariance de la position selon l’axe Y,
est la covariance de la position selon l’axe Y, est la covariance de la position selon l’axe Z,
est la covariance de la position selon l’axe Z, est la covariance du temps de l’utilisateur,
est la covariance du temps de l’utilisateur,
Rappel : En théorie des probabilités et en statistique, la covariance entre deux variables aléatoires est un nombre permettant de quantifier leurs écarts conjoints par rapport à leur espérances respectives.
Rappel : En théorie des probabilités, l’espérance mathématique d’une variable aléatoire réelle est, intuitivement, la valeur que l’on s’attend à trouver, en moyenne, si l’on répète un grand nombre de fois la même expérience aléatoire.
En fait la GDOP doit être considérée comme un facteur d’aggravation de l’erreur probable sur la pseudo-distance.
D’une manière plus pratique, on peut considérer que la GDOP est proportionnelle à l’inverse du volume de l’hexaèdre formé par l’utilisateur et les 4 satellites.
La GDOP, ou sa version restreinte aux 3 dimensions X, Y, Z : la PDOP (Position Dilution of Precision), est calculée par le récepteur G.P.S.
![\[ PDOP=\sqrt{\sigma_x^2+\sigma_y^2+\sigma_z^2}\]](https://www.rene-reyt.fr/wp-content/ql-cache/quicklatex.com-742b9d13f05312a79a63fd059956b765_l3.png "Rendered by QuickLaTeX.com")
Calcul de la PDOP.
Il faut que la GDOP soit la plus faible possible. Des valeurs de 2 à 3 sont excellentes. On admet que la GDOP est bonne lorsque sa valeur n’excède pas 6 et qu’elle est inacceptable au-delà de 10. Mais tout dépend du niveau de précision souhaité.
Lorsque la constellation G.P.S. est complète et en service et que d’un lieu donné on peut voir simultanément jusqu’à 8 satellites, la GDOP ou la PDOP calculée sert de critère de choix des 4 meilleurs satellites. Les meilleurs satellites étant ceux dont les positions relatives conduisent à la plus faible GDOP possible.
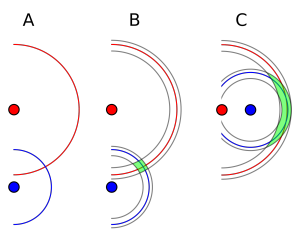
Notion de GDOP.

Premier exemple (à G) : les satellites sont très proches, mal répartis. La mesure est donc peu fiable, on obtiendra un GDOP élevé, supérieur à 8. En pratique il est donc utile pour le récepteur de calculer ce facteur. Dans le cas où un nombre suffisant de satellites sont visibles, le récepteur peut donc choisir de rajouter ou d’enlever des satellites pour la mesure, en choisissant la configuration où la GDOP est la meilleure.
Deuxième exemple (à D) : les satellites sont biens répartis dans le ciel, ils sont éloignés entre eux. Le facteur GDOP est donc bon, à savoir proche de 1.
Un autre aspect pratique du GDOP, et également le plus simple, est qu’il suffit de multiplier le coefficient GDOP obtenu après calcul avec l’erreur « théorique » (compte tenu des erreurs inhérentes au système GPS) pour obtenir une estimation de l’erreur réelle sur la position.
L’erreur de navigation
L’erreur de navigation est donnée par la relation :
2 X PDOP X UERE = UNE
Calcul de l’erreur de navigation.
Avec :
- UNE (User Navigation Error) en mètres.
- UERE en mètres.
- PDOP sans unité.
Lorsque l’altitude présente moins d’intérêt (cas des G.P.S. utilisant une navigation en 2D), le récepteur calcule la EPE (Estimated Position Error) à partir de la HDOP (Horizontal Dilution Of Precision). Dans ce cas :
2 X HDOP X UERE = EPE
Calcul de l’EPE.
Avec :
- HDOP =

- UERE en mètres.
- EPE en mètres.
Précédent : Les récepteurs G.P.S. – Suivant : Les interfaces des récepteurs