
Le G.P.S. (1) – Généralités
(Document écrit en 2015)
- Le G.P.S. Définition
- Historique
- Les familles de satellites
- Principe général
- Le segment spatial
- Le segment contrôle
- Le segment utilisateur
- L’équipement utilisateur
- Détermination de la position
- Synchronisation des horloges
- Notion de canaux
- Les récepteurs parallèles
- Les récepteurs séquentiels
- Les récepteurs multiplexés
Le G.P.S. – Définition

Le G.P.S. (Global Positionning System) NAVSTAR (NAVigation System with Time And Ranging) est un système de radionavigation par satellites qui permet aux utilisateurs une détermination très précise de leur position, de leur vitesse et du temps.
Le fonctionnement complet du système G.P.S. dépend de 3 segments :
- Spatial
- Contrôle
- Utilisateurs
Il permet à chaque utilisateur d’obtenir :
- Sa position (3 dimensions)
- Sa vitesse (3 dimensions)
- Une référence de temps.
et ce :
- En tout point du globe terrestre
- En permanence
- Avec une grande précision
Historique
 À l’origine, le GPS était un projet de recherche de l’armée américaine. Il a été lancé dans les années 1960 à la demande du président Richard Nixon. La réalisation a été confiée à Ivan A. Getting qui a conçu le principe d’un groupe de satellites gravitant en orbite et émettant des ondes radio UHF (300 à 3000 MHz) captées par des récepteurs GPS.
À l’origine, le GPS était un projet de recherche de l’armée américaine. Il a été lancé dans les années 1960 à la demande du président Richard Nixon. La réalisation a été confiée à Ivan A. Getting qui a conçu le principe d’un groupe de satellites gravitant en orbite et émettant des ondes radio UHF (300 à 3000 MHz) captées par des récepteurs GPS.
Le premier satellite est lancé en 1978 par une fusée Delta IV. On eut ensuite la mise en place de la première constellation de satellites BLOCK 1.
En 1983, le président Ronald Reagan, à la suite de la mort des 269 passagers du vol 007 Korean Airlines, propose que la technologie GPS soit disponible gratuitement aux civils, une fois opérationnelle.
L’explosion de la navette Challenger survenue en janvier 1986 a interrompu les procédures de lancement, ce qui a entraîné une remise en cause du projet et la décision d’utiliser un lanceur spécifique (DELTA 2) pour les autres satellites. Le lancement a repris alors dès 1989. De 1989 a 1994 on a eu la mise en place de la deuxième constellation et de ses variables BLOCK 2/2A/2R.
En 1995, le déploiement des 24 satellites opérationnels (plus 4 en réserve) est achevé. Le système devient alors fonctionnel. Le nombre de satellites disponibles permet de rendre le GPS opérationnel en permanence sur l’ensemble de la planète, avec une précision limitée à une centaine de mètres pour un usage civil.
En 2000, le président Bill Clinton confirme l’intérêt de la technologie à des fins civiles et autorise une diffusion non restreinte des signaux GPS, permettant une précision d’une dizaine de mètres et une démocratisation de la technologie au grand public à partir du milieu des années 2000.
Les États-Unis continuent de développer leur système par le remplacement et l’ajout de satellites ainsi que par la mise à disposition de signaux GPS complémentaires, plus précis et demandant moins de puissance aux appareils de réception.
Un accord d’interopérabilité a également été confirmé entre les systèmes GPS et Galileo afin que les deux systèmes puissent utiliser les mêmes fréquences et assurer une compatibilité entre eux.
Deux autres systèmes ont été mis au point par la Russie, le GLONASS à partir de 1980, et par la Chine, le Compass initié en 2000.
Les familles de satellites
Il existe six familles de satellites G.P.S. :
-

Satellite du Block III Les satellites Block I : ce sont des prototypes qui ont été lancés entre 1978 et 1985. Ils étaient prévus pour une mission moyenne de 4,5 ans et une durée de vie de 5 ans. Mais leur durée de vie moyenne s’éleva à 8,76 années. Leur mission principale était de valider les différents concepts du système GPS.
- Les satellites Block II : premiers satellites opérationnels du système GPS, leur autonomie a été particulièrement améliorée par rapport à leurs prédécesseurs. Ils sont capables de rester 14 jours sans contact avec le segment de contrôle tout en gardant une précision suffisante. Neuf satellites furent lancés entre 1989 et 1990. Bien que leur durée de vie avait été estimée à 7,5 ans, la plupart d’entre eux sont restés en fonction pendant plus de dix ans. Il reste aujourd’hui encore trois satellites du Block II.
- Les satellites du Block IIA (Avancés) : ils furent mis sur orbite entre 1990 et 1999, et correspondent à une version perfectionnée des satellites du Block II Initial, puisqu’il peuvent se transmettre mutuellement des messages pendant six mois sans aucun contact avec le sol.
- Les satellites Block IIR (Remplacement) : lancés entre 1999 à 2004, d’une durée de vie supérieure à 10 ans, ils permettent de régénérer la constellation GPS et de remplacer les satellites en panne.
- Les satellites Block IIF (Follow-On) construits par Boeing : ils doivent être lancés dès 2007. Le programme cherche ainsi à atteindre une constellation de 33 satellites.
- Les satellites du Block III : ces satellites auront pour mission de faire perdurer le GPS jusqu’en 2030 et plus.
Principe général
 Le G.P.S. utilise le principe de la mesure de distance à partir de satellites dont on connaît exactement la position dans l’espace.
Le G.P.S. utilise le principe de la mesure de distance à partir de satellites dont on connaît exactement la position dans l’espace.
En calculant la distance séparant le récepteur G.P.S. de plusieurs satellites on en déduit la position de l’observateur.
L’utilisateur étant passif :
-
il est discret,
-
le système est non saturable.
Remarque : contrairement à une idée répandue, les satellites G.P.S. ne transmettent pas les cartes topographiques. Seule les coordonnées de la position courante sont calculées par le récepteur. l’affichage de la carte est réalisé par un système d’information géographique (SIG), les cartes étant soit stockées en mémoire du SIG, soit transmises par un media radioélectrique (GPRS, Internet, …).
Le segment spatial
Le segment spatial est constitué par l’ensemble de la constellation des satellites.
La constellation opérationnelle comprend au moins 27 satellites gravitant en orbite terrestre moyenne. Chaque satellite émet un code particulier, ce qui permet aux récepteurs de l’identifier précisément et de traiter ses signaux en conséquence.
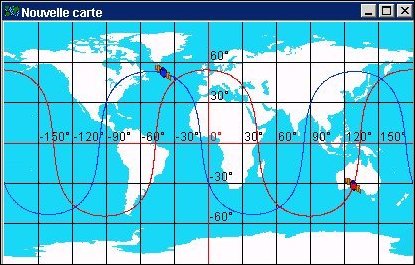
- L’altitude orbitale (environ 20 178 km, et une période de 11:58 h) a été choisie pour minimiser le nombre de satellites et rendre possible une trajectoire précise.
- 6 plans orbitaux, décalés de 60° entre-eux, ont une inclinaison de 55° par rapport au plan de l’équateur.
- la position de chaque satellite est connue avec une précision inférieure à 1m.
Chaque satellite dispose de fusées auxiliaires afin que les contrôleurs au sol puissent éventuellement corriger son orbite.
Le satellite est alimenté en courant électrique grâce à des panneaux solaires. Il utilise des batteries rechargeables lorsqu’il passe dans l’ombre de la Terre.
Chaque satellite émet en permanence ses signaux vers la terre.
Il reçoit également, en permanence, les signaux de gestion venant du segment contrôle.
Deux sortes de signaux de navigation sont émis par les satellites de la constellation G.P.S. :
- Le code C/A, permettant un usage civil (Monsieur tout le monde).
- Le code P, chiffré, réservé aux usages militaires et nécessitant une autorisation du DOD (Ministère de la défense Américain)
Ces deux signaux sont transmis sur deux porteuses U.H.F. :
- L1 (Link 1) = 1575,42 MHz.
- L2 (Link 2) = 1227,60 MHz.
(modification du 01/10/2017 : Dans le cadre de la modernisation du système G.P.S. de nouvelles bandes de fréquences sont définies.)
Le segment contrôle
Composé des stations de contrôle et du centre de contrôle, il assure :
- la gestion et la surveillance des satellites,
- l’élaboration des messages de données transmis aux satellites.
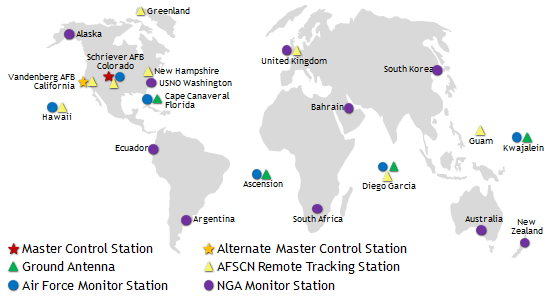
En phase opérationnelle, il comprend :
- Cinq stations de contrôle largement espacées, qui effectuent des mesures sur les niveaux de tous les satellites, relativement à une horloge atomique. Elles contiennent également des senseurs météorologiques.
- L’ensemble des données ainsi recueillies est transmis au centre de contrôle.
- Le centre de contrôle NAVSTAR autonome prend en compte les données reçues par les stations de contrôle, effectue les calculs d’erreur de paramétrage et de correction, élabore les messages de données pour les satellites et les transmet à ceux-ci lors de leur passage en visibilité.
- Il assure également la gestion centralisée du système.
- Un centre de contrôle de secours.
Le segment utilisateur
C’est l’élément final de la chaîne G.P.S. On distingue plusieurs classes d’utilisateurs, lesquelles se sub-divisent en sous-classes :
- Les utilisateurs militaires
- Les utilisateurs terrestres (Troupes au sol, véhicules, engins blindés, artillerie, etc.)
- Les utilisateurs aériens (Avions de combat, avions de transport, drones, missiles, etc.)
- Les utilisateurs maritimes (Tous types de navires, sous-marins, etc)
- Les Utilisateurs civils
- Les utilisateurs terrestres
- Randonneurs, course d’orientation
- Navigation routière
- Géomètres, géodésiens
- Trains
- Les utilisateurs aériens
- Avions, ULM, planeurs, modèles réduits…
- Satellites
- Les utilisateurs maritimes
- Tous types de navires, bateaux, du plus petit au plus grand.
- Les utilisateurs terrestres
L’équipement utilisateur
L’équipement utilisateur comprend :
- un ensemble de réception,
- un ensemble de calcul et gestion,
- un module d’interface.
L’ensemble de ces fonctions est souvent regroupé dans une même unité.
L’équipement permet de déterminer :
- la position de l’utilisateur,
- la vitesse de l’utilisateur,
- l’heure ainsi que l’erreur de son horloge locale.
Remarque : Parfois, l’ensemble G.P.S. est intégré dans une unité fournissant d’autres services. C’est le cas, très répandu, des smartphones.
Détermination de la position
C’est l’équipement utilisateur qui effectue les calculs de coordonnées à partir des signaux satellites.
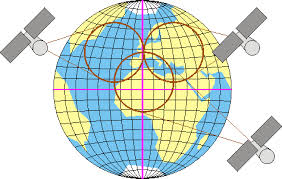
 Le principe de localisation est en lui même très simple. Si on veut localiser un point M, de la surface du globe terrestre, il suffit de recevoir les messages de 3 satellites.
Le principe de localisation est en lui même très simple. Si on veut localiser un point M, de la surface du globe terrestre, il suffit de recevoir les messages de 3 satellites.
Chaque satellite envoie son numéro d’identification, sa position précise par rapport à la terre, ou dans le repère lié à Greenwich et l’heure exacte d’émission du signal.
Le récepteur GPS, grâce à son horloge synchronisée sur celle des satellites, calcule donc le temps de propagation à la vitesse de la lumière et en déduit la distance au satellite.
Le boîtier récepteur, procède par mesures de déduction des distances. De ce point de vue, le G.P.S. travaille en régime sphérique.
Le point M est donc sur une sphère de rayon D1 et de centre le satellite S1 : l’intersection avec le globe donne un premier cercle C1.
Le point M est aussi sur une sphère de rayon D2 et de centre le satellite S2 : l’intersection avec le globe donne un deuxième cercle C2. Les cercles C1 et C2 se coupent donc en 2 points.
Le point M est enfin sur une sphère de rayon D3 et de centre le satellite S3 : l’intersection avec le globe donne un troisième cercle C3. C’est le troisième satellite qui précise de manière unique le point M cherché.
Les coordonnées du point de station de l’antenne G.P.S. sont fournies dans le référentiel géodésique WGS84. Sur certains récepteurs, l’unité de calcul peut fournir les coordonnées dans un autre référentiel à la demande de l’opérateur.
Synchronisation des horloges

Le calcul de la position étant basé sur la mesure du temps de propagation des ondes radioélectriques entre les satellites et le récepteur, on comprend l’importance de l’exacte synchronisation des horloges entre les satellites et les récepteurs.
Remarque : Sachant que la lumière se propage à 299 792 458 m/s (dans le vide), un décalage de 1 ms aurait pour conséquence une erreur de 299,792 km sur la distance calculée.
Il est donc nécessaire d’embarquer, dans les satellites, des horloges de très haute précision.
Chaque satellite embarque une horloge atomique laquelle présente malgré tout une dérive à long terme. Afin d’éviter une désynchronisation du temps GPS entre les différents satellites, les paramètres de correction des horloges sont maintenus par le Segment Contrôle et transmis dans les signaux de chaque satellite via les codes C/A et P.
Pour permettre la synchronisation des horloges des récepteurs G.P.S. la transmission du signal d’un quatrième satellite est nécessaire. Ainsi, par calcul dans le récepteur, on s’affranchit des dérives d’horloges pour le calcul des distances.
En ce qui concerne le segment contrôle, les horloges étalon utilisent la technologie des fontaines d’atomes froids, dont la précision relative est de l’ordre de 10-12 (dérive = 1 s en 3200 ans).
Le futur appartiendra aux résonateurs optiques dont la précision relative devrait atteindre 10-18.
Notion de canaux
Le calcul du point nécessite l’acquisition et le traitement des données fournies par 4 satellites au minimum, voire plus. Pour assurer un rafraîchissement des informations de navigation cohérent avec la mission du mobile, plusieurs techniques de réception sont utilisées.
Il existe trois types de récepteurs G.P.S. :
- les récepteurs parallèles,
- les récepteurs séquentiels
- les récepteurs multiplexés.
Les récepteurs parallèles
Les récepteurs parallèles possèdent les circuits (par construction) nécessaires à l’acquisition simultanée de plusieurs satellites.
Les récepteurs parallèles sont plus rapides lors de l’acquisition des données de la constellation (mise sous tension) et le rafraîchissement des données fournies sont plus rapides. Ce type de récepteur est quasiment indispensable aux utilisateurs se déplaçant à grande vitesse ou étant sujets à de fortes accélérations (avions de combat, missiles).
Les récepteurs séquentiels
La construction de récepteurs parallèles présente quelques inconvénients : le coût, la complexité…
Pour réduire le prix, on a imaginé des récepteurs a 2 chaînes de réception.
Pendant que l’une démodule et extrait les données de navigation d’un satellite, l’autre effectue l’acquisition du satellite suivant; cela à tour de rôle pour les satellites choisis pour le calcul de la position.
Les récepteurs multiplexés
Enfin, pour construire un récepteur G.P.S. à faible coût, on a imaginé une seule chaîne de réception, laquelle sélectionne successivement les satellites garantissant la meilleure précision, puis démodulant et calculant (également à tour de rôle) les données de chaque satellite.
Bien entendu la fréquence de rafraîchissement des données de navigation est étroitement dépendante de la puissance de calcul embarquée dans le récepteur. Suivant cette puissance de calcul, le récepteur est capable de traiter un nombre fini de satellites donnant ainsi l’apparence de la simultanéité.
Ces récepteurs multiplexés sont spécifiés pour traiter un certain nombre de canaux. On parle de récepteurs G.P.S. multicanaux.
L’offre commerciale n’a cessé de croitre en ce qui concerne le nombre de canaux. De nos jours il n’est pas rare de voir un récepteur G.P.S. 24 canaux. Certains produits atteignent un nombre de canaux sans rapport avec une constellation visible réelle.
La quasi totalité des récepteurs portables civils proposés à la vente du grand public sont des mono récepteurs, multiplexés.
Remarque : Compte tenu de l’évolution des technologies et des techniques de traitement numérique, il n’est pas exclu de voir apparaître un jour des récepteurs multiplexés présentant des performances compatibles avec un usage aéronautique.