
Principe de fonctionnement d’un OBS
L’ensemble VOR va permettre au pilote :
- De savoir en permanence le relèvement de la station VOR (le QDM de cette station), où autrement dit le cap magnétique à suivre, par vent nul, pour rejoindre la balise VOR. La lecture peut se faire sur un RMI, mais de manière plus précise sur l’OBI.
- De savoir, en ayant choisi un radial sélectionné à l’OBS (par action manuelle sur l’OBI), s’il se trouve à droite ou à gauche par lecture de l’aiguille de déviation de l’OBI. La déviation maximum de l’aiguille correspond à un écart angulaire de ± 10°.
- De connaitre, par rapport au radial sélectionné sur l’OBS, si l’aéronef se trouve :
- dans le 1/2 espace délimité par une droite perpendiculaire au QDM sélectionné sur l’OBS et dans lequel la 1/2 droite du radial sélectionné se trouve, dans ce cas le drapeau indique TO,
- dans le 1/2 espace délimité par une droite perpendiculaire au QDM sélectionné sur l’OBS et dans lequel la 1/2 droite du radial sélectionné ne se trouve pas, dans ce cas le drapeau indique FROM.
- D’avoir la confirmation que l’information affichée sur l’OBI est valide. Un information non valide peut provenir :
- du récepteur VOR en panne,
- d’une mauvaise réception (orages, cône de silence, brouillages, etc.),
- d’une balise VOR en panne ou d’une fréquence choisie non affectée au VOR.
Remarque importante : Les indications du V.O.R. sont indépendantes du cap suivi par l’aéronef.
Utilisation de l’OBI

Mieux qu’un grand discours, voici un site qui détaille l’utilisation du VOR lors d’une navigation.
Ou ici pour ceux qui sont fâchés avec la langue de Shakespeare.
Ou encore ici.
Enfin un bon résumé des aides à la navigation en vol ici.
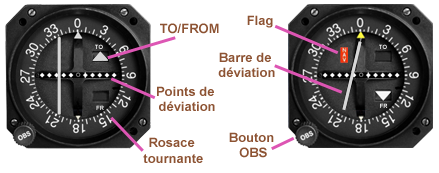
Fonctionnement de l’OBI
L’aiguille de déviation
L’aiguille ou barre de déviation est un simple galvanomètre à zéro central étalonné. sa déviation est proportionnelle à l’écart de position par rapport au radial sélectionné.
L’échelle de déviation est matérialisée par des points horizontaux. Chaque point correspond à une déviation de 2° par rapport au radial sélectionné.
Le Flag
Le Flag est un galvanomètre qui fonctionne en tout ou rien (Flag apparent ou Flag effacé).
Le drapeau To – From
Le To-From est un peu plus sophistiqué que le Flag. C’est un galvanomètre à 3 positions (To – rien d’affiché ou OFF – From).
Au repos le To-From ne laisse rien apparaître (ou bien OFF). C’est le cas d’un mobile passant « travers balise » par rapport au radial sélectionné.
La zone d’incertitude (ni TO, ni FROM) est de ± 5°.
L’OBS
L’OBS est manoeuvré par le pilote lorsqu’il souhaite sélectionner un radial. En tournant le bouton, il fait défiler une rose située sur le pourtour de l’indicateur et graduée en degrés. Certains OBI possèdent une fenêtre dans lequel un affichage décimal indique le radial choisi.
Une fois le radial sélectionné, l’information est envoyée au récepteur VOR. En fonction des signaux reçus, le récepteur enverra les commandes appropriées à l’aiguille de déviation sur l’OBI, le TO-FROM et le Flag.
L’OBS comporte un composant appelé résolver. Le résolver utilise la propriété de deux enroulement statiques disposées en quadrature et excités par un rotor dont la position angulaire est fonction du radial sélectionné, l’ensemble se comporte comme un déphaseur ajustable.
Principe de fonctionnement
Le résolver est constitué de 3 enroulements :
- 2 stators positionnés à 90° (quadrature) l’un de l’autre (S1 et S2).
- 1 rotor dont l’angle de couplage est ajusté manuellement (Rt) lors du choix du radial.
 En utilisation, le rotor est alimenté par un générateur alternatif (signal de référence 30 Hz du récepteur VOR). Il provoque une f.e.m. induite dans chaque stator. Suivant l’orientation de Rt les f.e.m. induites dans S1 et S2 varient selon les lois :
En utilisation, le rotor est alimenté par un générateur alternatif (signal de référence 30 Hz du récepteur VOR). Il provoque une f.e.m. induite dans chaque stator. Suivant l’orientation de Rt les f.e.m. induites dans S1 et S2 varient selon les lois :


Par construction, on charge S1 par une « branche capacitive » et S2 par une « branche résistive ».
R et C sont choisis tels que  .
.
Ces conditions sont valables pour  , avec
, avec  dans la plupart des récepteurs VOR.
dans la plupart des récepteurs VOR.
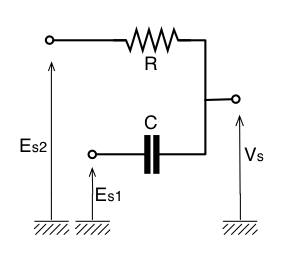
D’après le théorème de Thévenin, le montage ci-dessus peut être décomposé en deux montages élémentaires qui seront ensuite sommés.


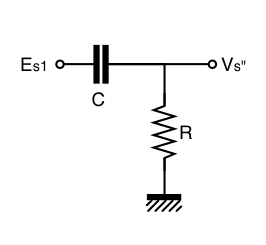

Vs étant égale à la somme de V′ et V″ : 

Le module de Vs

Par construction  , donc :
, donc :  . Par conséquent :
. Par conséquent :

 (si
(si  reste constante)
reste constante)
La phase de Vs

Comme par construction, on peut écrire :


Conclusion
La tension de sortie du résolver ainsi étudié possède une amplitude de sortie constante et égale à :

Son déphasage est égal à l’angle du rotor moins 45° :

Lors de l’étalonnage de l’OBI, l’angle  = 0° lorsque le radial sélectionné sur l’OBS est 315°
= 0° lorsque le radial sélectionné sur l’OBS est 315°
Ainsi utilisé, le résolver se comporte comme un déphaseur réglable dont la fonction de transfert est  .
.
Sa tension de sortie, constante quel que soit la sélection de l’OBS, nécessite un amplificateur pour compenser les pertes d’insertion inhérentes à son principe. Cette dernière fonction est réalisée dans le récepteur VOR.