
Le LORAN
 Le LORAN est né au cours de la seconde guerre mondiale, il préfigure de nombreux autres systèmes ayant une ambition : assurer une couverture mondiale.
Le LORAN est né au cours de la seconde guerre mondiale, il préfigure de nombreux autres systèmes ayant une ambition : assurer une couverture mondiale.
Cet objectif fut complètement atteint par la suite avec le système OMEGA.
LORAN est un acronyme de Long Range Navigation.
L’évolution du concept original de LORAN pour répondre aux exigences opérationnelles pour une plus grande précision et une plus grande portée de service a donné lieu au développement de trois systèmes connexes désignés comme LORAN-A, LORAN-B et LORAN-C.
Tous les systèmes LORAN fournissent des données de navigation sous la forme de lignes de position hyperboliques déterminées par les différences de temps entre la réception de signaux provenant de stations d’émission à terre, largement séparées.
Le principe technique qui distingue le LORAN des autres systèmes de radionavigation hyperboliques est l’utilisation des émissions pulsées. Ceci permet une mesure non ambiguë des différences de temps entre les signaux provenant des différentes stations et fournit en plus les moyens de discrimination entre la réception de l’onde de terre et des ondes ionosphériques.
Contrairement aux systèmes de navigation par satellites qui couvrent la totalité de la terre, le LORAN est un système régional.
Historique
Aucun effort de développement des moyens de navigation hyperboliques fut initié aux Etats-Unis, jusqu’à ce qu’il soit devenu évident que l’Amérique ne pourrait pas éviter sa participation dans la deuxième guerre mondiale. Avant 1940, les forces militaires américaines étaient petites et sous-financées, et il n’y avait pas d’armée de l’air, seulement des corps aériens de l’armée et de la marine.
Le LORAN A
Comme la plupart des autres aéronefs militaires de l’époque, on s’est peu préoccupé des problèmes de navigation précise sur les territoires hostiles. En 1940, sous l’égide du Comité de recherche de la Défense nationale, un comité micro-ondes a été mis sur pied pour examiner les nouveaux développements qui seraient nécessaires si les États-Unis devaient être impliqués dans la guerre européenne. L’un d’entre eux devait être un système de navigation radio hyperbolique pulsé opérant dans les basses fréquences du spectre VHF, à environ 30 MHz. Il est finalement devenu le système Loran-A, à partir duquel Loran-C est né. Le Loran-A fonctionnait dans la bande de 1850 à 1950 kHz, utilisait la différence de temps des impulsions comme principe de fonctionnement et avait en général une portée jour / nuit d’environ 800 à 1600 NM.
Le Comité technique du Corps des transmissions de l’armée américaine, lors d’une réunion le 1er octobre 1940, a rédigé une spécification appelant à un système de radionavigation avec une précision d’au moins 1 000 pieds sur une distance de 200 milles. Ce projet a été adopté comme «Projet 3 (ou C)» par le Comité micro-ondes et les commandes initiales d’équipement ont été passées en décembre 1940. Au début de l’été 1941, il a été annoncé au Radiation Laboratory Navigation Group que les zones pouvant être atteintes en utilisant une fréquence de 30 MHz étaient trop limitées pour les besoins américains et que de meilleurs résultats pourraient être obtenus à des fréquences plus basses dans la bande des ondes décamétriques. Alors que les émetteurs originaux de 30 MHz étaient encore en construction, de nouveaux émetteurs ont été livrés pour utiliser des fréquences comprises entre 3 et 8 MHz et les essais ont débuté en été 1941. Il est apparu presque immédiatement que les basses fréquences autour de 3 MHz étaient plus stables. Mais des difficultés à effectuer des mesures précises de retard persistaient. Il faut se rappeler qu’à ce moment-là pratiquement aucun travail n’avait été fait sur la transmission d’impulsions de basse fréquence à haute puissance, et la technique n’en était qu’à ses balbutiements.
Pendant ce temps, le bureau de liaison du Royaume-Uni aux Etats-Unis a fourni des informations sur un système similaire en cours de développement (GEE), y compris quelques détails sur la façon dont les mesures de temps étaient effectuées. Des essais comparatifs à différentes fréquences évaluant la performance de l’onde de sol et de l’onde ionosphérique ont finalement conduit au choix de 1.950 MHz et tous les travaux de développement ultérieurs utilisèrent cette fréquence. Il fut, à un moment donné, envisagé de la compléter avec une deuxième fréquence d’environ 7,5 MHz pour l’utilisation à longue distance de jour, mais cela n’a jamais été mis en œuvre, sauf à des fins de test.
À la mi-1942, l’ingénieur anglais (R. J. Dippy,) a été envoyé aux États-Unis pendant huit mois pour aider au développement du LORAN, son assistance a considérablement accéléré le développement du Loran. Une fois le design finalisé, la production s’est rapidement déroulée. La première paire Loran-A émit en ondes permanentes en juin 1942 (Montauk Point, New York, et Fenwick Is, Delaware), et en octobre, il y eut d’autres stations le long de la côte est canadienne. Le système est devenu opérationnel au début de 1943 et, vers la fin de l’année, des stations ont été installées au Groenland, en Islande, aux îles Féroé et aux Hébrides pour compléter la couverture de l’Atlantique Nord, certaines étant exploitées par la Royal Navy. À la demande de la RAF, une autre station a été mise dans les Shetlands pour couvrir la Norvège, et le LORAN a finalement été utilisé par plus de 450 avions du Coastal Command.
Mais c’est dans le Pacifique que le LORAN a apporté sa plus grande contribution directe à la victoire. Les distances dans l’océan Pacifique sont énormes. Alors que les forces américaines se déplaçaient vers l’ouest, des terrains d’aviation étaient construits sur de nombreuses petites îles et atolls qui parsèment l’océan au-delà d’Hawaï. La rayon d’action limité des nombreux avions de la Seconde Guerre mondiale exigeait qu’ils atterrissent et se ravitaillent fréquemment. La navigation par observations célestes n’était possible que lorsque le temps le permettait et, de plus, elle nécessitait un homme hautement entraîné faisant de choses dans l’avion sauf naviguer. En raison de la longue formation requise, les navigateurs célestes, en particulier dans les avions de l’armée de l’air, étaient extrêmement rares. C’est ainsi que LORAN a fourni un système de navigation précis et facile à utiliser.
Le programme LORAN était secret pendant la seconde guerre mondiale, un principe de sécurité a été appliqué pour que chaque station soit désignée avec une lettre afin de ne pas révéler l’emplacement de l’émetteur au cas où l’une des tables LORAN tomberait entre les mains ennemies.
Les stations LORAN ont également reçu des indicatifs d’unité. Le numéro d’unité (p.ex. : l’unité 10 pour Nantucket) était utilisé pour émettre des ordres au personnel affecté à une station et toute la correspondance dans le but de ne pas révéler l’emplacement de l’émetteur. Il a été décidé, par la suite, que ces informations n’avaient pas besoin d’être protégées.
Il y avait d’autres désignateurs utilisés après la guerre. Dope 1/2/3 étaient des noms de code pour les stations au Groenland pendant la guerre froide. Ce fut également le cas pour les stations qui ont été installées dans le cadre de la guerre de Corée (ELMO 1 – 7).
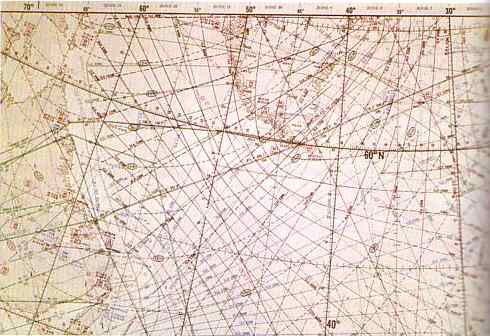
Pour exploiter les signaux émis par le LORAN, des cartes spécifiques indiquant les hyperboles de différences de temps sont nécessaires (voir ci-dessous).
Le LORAN B
Le LORAN-B fut une amélioration du Loran-A, il fut re-développé et de nouvelle fonctionnalités y furent ajoutées. Le développement en temps de guerre du système Loran-A avait été précipité. Même dans la zone des ondes de sol, ce ne fut jamais un système très précis. Dans sa conception d’origine, aucun effort n’avait été fait pour obtenir une cohérence de phase entre les impulsions transmises, ce qui rendait impossible leur comparaison.
Avec Loran-B, les émetteurs ont été repensés pour remplir cette fonction et un nouveau récepteur a également été développé. La comparaison de phase a vu sa précision augmentée d’environ un demi-cycle (environ 0,25 microseconde), ce qui représentait une amélioration considérable. Une autre nouveauté du système était que les émetteurs fonctionnaient en chaînes plutôt qu’en paires, permettant ainsi la mesure simultanée de plus de deux différences de temps.
Le LORAN C

Le LORAN-C, le successeur de LORAN-A et B, a été développé à l’origine pour fournir un service de radionavigation aux gardes-côtes des États-Unis. Il a été ensuite été étendu pour inclure une couverture complète des États-Unis et de la majeure partie de l’Alaska. Vingt-quatre stations américaines LORAN-C travaillent en partenariat avec des stations canadiennes et russes pour assurer une couverture dans les eaux canadiennes et dans la mer de Béring.
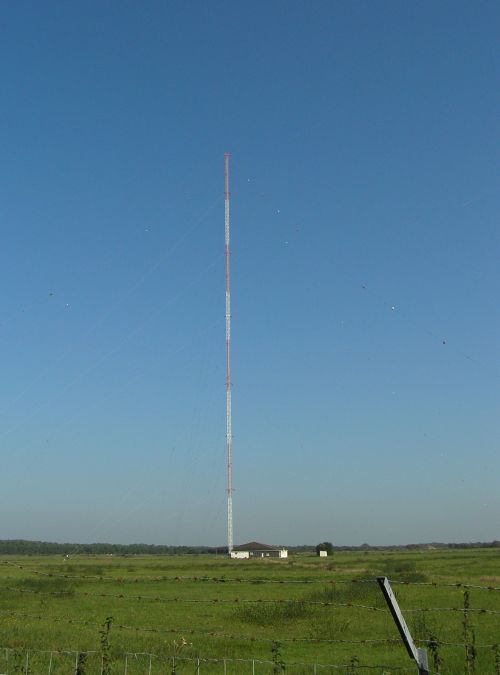
Le LORAN-C offre une précision absolue de plus de 0,25 mille nautique (460 mètres) dans les zones couvertes. Sa fréquence d’émission est de 100 kHz (750 m de longueur d’onde). Les puissances émission varient de quelques centaines de kilowatts à plus d’un 1 mégawatt. Les antennes émission atteignent des hauteurs de plus de 300 mètres.
Les utilisateurs peuvent relever des positions préalablement déterminées avec une précision de 18 à 90 mètres en utilisant le LORAN-C en mode différentiel. Les progrès technologiques ont permis une plus grande automatisation des opérations du système. Les nouvelles technologies ont permis aux gardes-côtes des États-Unis d’établir un contrôle centralisé du système américain sur deux sites. Un nouveau principe de récepteur a amélioré la facilité d’utilisation du système. La majorité des 1,3 million de LORAN utilisés dans le monde sont principalement destinés aux marins. Mais le LORAN-C est également très apprécié par la communauté de l’aviation générale, avec quelque 80 000 avions équipés du système.
Principe sommaire du LORAN
Le système Loran C est constitué de groupes d’émetteurs basés sur des stations appelées chaines.
Une chaine contient :
- Une station maître (Master station M),
- 2 mais plus couramment 4 ou 5 stations secondaires appelées V (Victor), W (Wisky), X (X-ray), Y (Yankee), Z (Zulu).
Ces stations sont implantées de telle manière qu’elles soient séparées par plusieurs centaines de milles. Leur positionnement est étudié de telle manière que les portées soient optimum pour la zone à couvrir et la précision des relèvements à bord des mobiles aussi précise que possible.

Soient deux stations de transmission A et B transmettant simultanément le même train d’impulsions. On suppose que la distance entre ces deux stations est de 972 milles marins (soit 1 800 km). Pour parcourir la distance entre ces deux stations une onde électromagnétique mettra 6 000 μs.
Une ligne de position (LOP) peut être définie en fonction de la différence de temps de réception entre le signal de A et de B. L’illustration à droite représente l’ensemble des positions possibles pour une différence de temps (LOP) de 2 000 μs. Ces lignes sont des hyperboles ayant pour foyer les stations A et B.
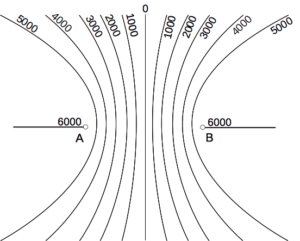 On peut tracer un réseau d’hyperboles pour représenter les lignes de positions de plusieurs différences de temps (figure à gauche) pour des différences de temps multiples de 1 000μs.
On peut tracer un réseau d’hyperboles pour représenter les lignes de positions de plusieurs différences de temps (figure à gauche) pour des différences de temps multiples de 1 000μs.
Lever de doute sur les LOP
Si les deux stations émettent simultanément on constate qu’il existe deux LOP pour une même différence de temps.
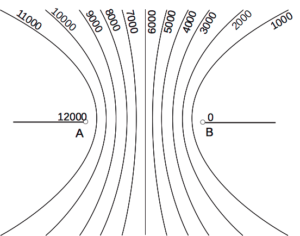
Pour lever l’ambiguïté, la station B, émet qu’après avoir reçu le signal de A ; la station A est dite station maître et la station B station esclave.
Les lignes de position ne changent pas, mais la valeur de la différence de temps associée à ces lignes est modifiée (figure ci-dessous à G.).
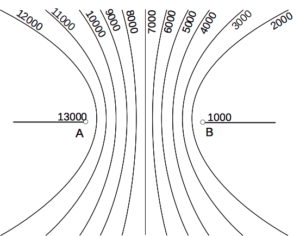 Le lever de doute précédent crée un autre problème.
Le lever de doute précédent crée un autre problème.
Dans le prolongement de la ligne de base (ligne AB), du côté de la station B (esclave), la différence de temps est nulle : les signaux A et B arrivant en même temps, on ne peut les discriminer et donc il est impossible de savoir sur quelle ligne de position l’on se situe.
La discrimination est rendue possible en imposant à la station esclave (B) de n’émettre qu’après un délai donné après réception du signal de la station maître (A).Ce délai s’appelle le Coding Delay. La figure ci-dessus à D, représente les LOPs avec l’ajout d’un coding delay de 1000  s.
s.
Géolocalisation
Supposons une terre plate, avec un système de coordonnées x, y.
- Coordonnées de la station maître :

- Coordonnées de la station esclave :

- Coordonnées du point A :

La distance entre A et la station maître : 
La distance entre A et la station esclave : 
La différence de distance est : 
La différence de temps est : 
Les chaînes LORAN
Un couple maître – esclave permet de déterminer une ligne de position (LOP).
En ajoutant une deuxième station esclave, on obtient le croisement de deux lignes de position et donc la position du mobile. Cette dernière peut être effectuée par report sur une carte spécialisée ou par calcul. Dans ce dernier cas c’est l’équipement de réception qui effectue cette opération.
Dans la terminologie LORAN l’ensemble station maître et stations esclaves s’appelle une chaîne.
Pour couvrir la totalité des zones choisies par le système LORAN, plusieurs chaînes sont nécessaires (voir figure zones de couverture).
Une chaîne LORAN est donc constituée de :
- 1 x station maître, identifiée par la lettre M.
- de 2 à 4 stations esclaves, identifiées par les lettres V, W, X, Y et Z.
La station maître émet le signal de référence, lequel est réémis par les esclaves (à tour de rôle) après un délai de retard précis (coding delay). Les périodes de répétition et les délais de retard sont choisis pour éviter tout brouillage mutuel des impulsions dans la zone de couverture d’une chaîne.
Le signal de navigation LORAN-C est une séquence d’impulsions, modulant en amplitude une onde porteuse de 100 kHz.
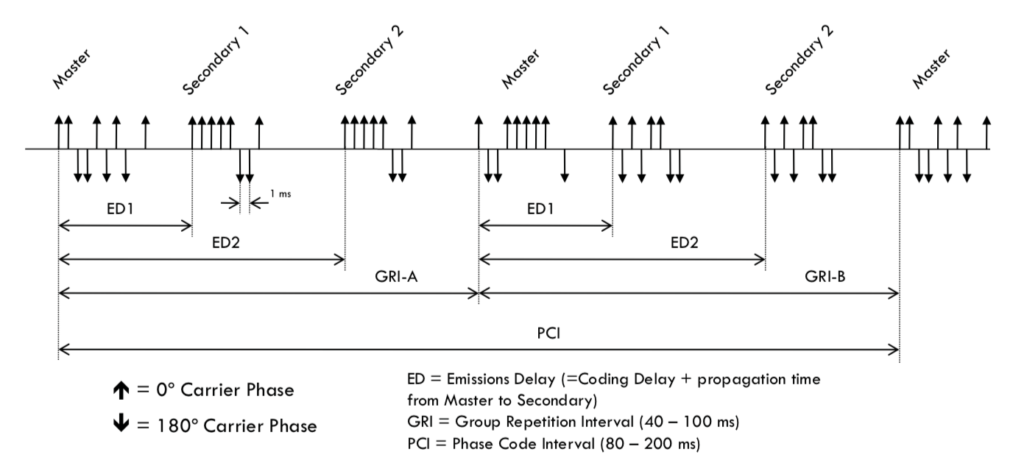
Toutes les stations secondaires (esclaves) émettent des trames de 8 impulsions, alors que le signal de la station maître (M), à des fins d’identification, émet une neuvième impulsion supplémentaire. La séquence des transmissions de signaux se compose d’un groupe de 9 impulsions provenant de la station maître (M) suivi à des intervalles de temps précis par des trains de 8 impulsions émis par les stations secondaires (esclaves). L’intervalle de temps entre la réapparition de l’impulsion maître est appelé Intervalle de répétition de groupe (GRI). Chaque chaîne Loran-C possède une GRI unique.
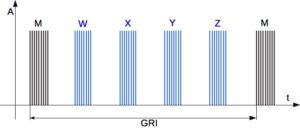
Comme tous les émetteurs LORAN-C fonctionnent sur la même fréquence (100 kHz), le GRI est la clé par laquelle un récepteur peut identifier et isoler des groupes de signaux d’une chaîne spécifique. Dans la dénomination des chaînes, le GRI est inclus. À titre d’exemple, la chaîne des Grands Lacs a une GRI de 8970. Cela signifie que l’intervalle de temps est de 89700 s. Le zéro le plus à droite est toujours implicite et le GRI est toujours exprimé par multiples de 10 microsecondes.
Dans les anciens récepteurs LORAN-C, l’opérateur devait réellement régler ce nombre pour recevoir la chaîne. Dans les cas où les signaux du LORAN étaient observés sur un oscilloscope, les impulsions de la chaîne désirée étaient alors synchrones tandis que celles des autres chaînes se décalaient dans la base de temps à des vitesses variables. C’était en fait le seul moyen d’identifier une chaîne.
Dans les récepteurs modernes cela se fait automatiquement.
En 1989, il y avait 16 chaînes LORAN-C comprenant 67 stations et émettant sur 100 kHz. En 2000, il y avait 28 chaînes. La disponibilité du signal des stations d’émission est supérieure à 99,9%.
Les impulsions du LORAN
Emettre des impulsions de 200 s et de forme carrée avec une fréquence porteuse de 100 kHz est techniquement une gageure. Les concepteurs du LORAN ont préféré une forme d’onde comme représenté ci-dessous.
Forme d’une impulsion
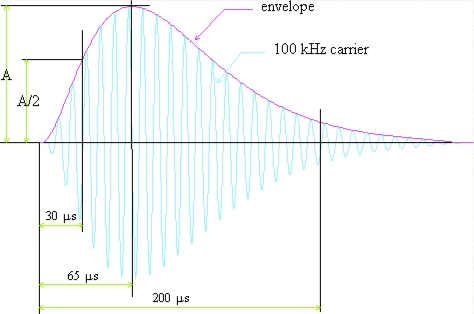
Une impulsion dure 200 s. Son maximum est atteint 65 s après le début du signal.
Le temps de départ d’une impulsion qui est pris en compte pour la mesure des différences de temps correspond au passage positif à zéro de la porteuse (100 kHz) 30 s après le début de l’impulsion.
La fin des oscillations amorties se situe à 400 s après le début du signal.
On considère que la fin de l’impulsion se produit au passage à zéro de la porteuse à 200 s après le début du signal.
La forme d’onde est ainsi définie :

avec t en microsecondes
Train d’impulsions
Chaque train d’impulsions maître (9 impulsions) ou esclave (8 impulsions) se décompose comme suit :
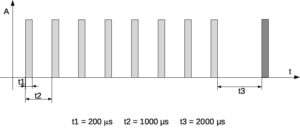
- Chaque impulsion à une largeur de 200 s
- les impulsions sont espacées de 1000 s, sauf dans le cas de la station maître où les deux dernières sont espacées de 2000 s
Le codage de phase
Bien que les GRI soient choisis pour minimiser les chevauchements de temps entre les stations de différentes chaînes; les occurrences ne peuvent pas être totalement éliminées et sont une source d’erreur lors de l’utilisation du LORAN. Les autres sources d’erreur comprennent le bruit du canal / récepteur et l’interférence entre l’onde céleste et l’onde de sol.
Pour réduire les effets du brouillage et du bruit sur les mesures de différence de temps, et pour faciliter la discrimination entre les stations maître et esclaves, la phase de la porteuse est inversée selon une séquence prédéterminée.
Le motif est représenté dans la figure ci-dessous, où un signe moins indique une impulsion inversée (déphasage de 180 °), et un signe plus signifie pas de déphasage.
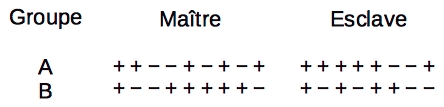
Chaque groupe (A ou B) est appliqué alternativement pour chaque GRI.
 Le canal de données
Le canal de données
Depuis 2001, une modulation de phase complémentaire de la dernière impulsion a été ajoutées, permettant de transmettre des informations à bas débit. Ce système est appelé LDC (Low Data Channel) sur les chaînes américaines et EUROFIX sur les chaînes européennes. Il est utilisé pour transmettre des données relatives aux stations (intégrité, temps) et des corrections de type WAAS, DGPS ou Navtex.
La propagation
Lors de leur propagation dans l’espace, les ondes radio subissent l’influence des milieux traversés. Pour la fréquence utilisée pour le LORAN (100 kHz) elles subissent réflexions, réfractions et diffractions. Selon l’heure de la journée chaque influence varie et donne lieu à des trajets variables et donc des distances et des temps de propagation différents.
Deux trajets principaux sont identifiés :
- L’onde de sol
- L’onde de ciel ou céleste
Leurs trajets est schématisé dans la figure ci-dessous. La réception simultanée de ces deux ondes provoque une dégradation de la précision.
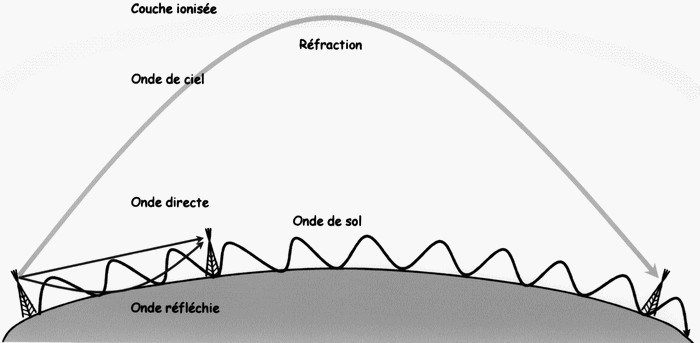
Les techniques de codage de phase, décrites précédemment, permettent de minimiser l’incertitude absolue lors de la mesure des délais pour chaque trajet.
Synoptiques Simplifiés
Chaque station d’émission LORAN-C se compose d’un émetteur d’impulsions asservi en puissance et en phase. Les émetteurs de toutes les stations (maîtres et esclaves) sont capables d’effectuer les mêmes fonctions, ainsi la fabrication, la mise en oeuvre et la maintenance s’en trouvent simplifiées.
Chaque station LORAN-C possède deux pilotes, deux émetteurs, un équipement de commutation et de contrôle, une antenne réceptrice et une antenne d’émission. En fonctionnement normal, un pilote et un émetteur sont utilisés pour maintenir le fonctionnement en émission. Les autres ensembles sont maintenus en état de veille pour assurer un taux de disponibilité élevé. Le pilote de secours est également utilisé pour effectuer des fonctions de surveillance.
Synoptique d’une station maître
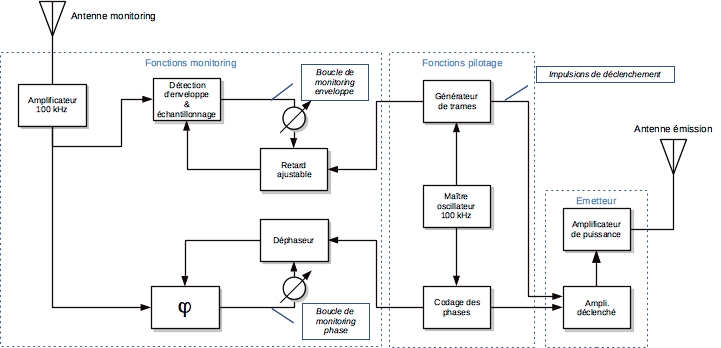
Un pilote à haute stabilité fournit la fréquence de base : 100 kHz.
Il assure la synchronisation d’un générateur de trames d’une part, et d’un codeur de phases d’autre-part.
Le générateur de trames fournit les trains de 9 impulsions (station maître) en synchronisme avec le 100 kHz de référence et avec un intervalle de répétition égal au GRI de la chaîne dont l’émetteur fait partie.
En synchronisme avec le 100 kHz de référence le codeur de phase applique à chaque GRI les séquences pseudo-aléatoires définies pour leur groupe A ou B.
Les trains d’impulsions commandent un Amplificateur déclenché, tandis que le codeur de phases applique les déphasages appropriés à la porteuse ainsi générée.
Un amplificateur de forte puissance (qq centaines de kW à plus d’un MW selon les chaînes) excite un mât d’antenne adapté à la grande longueur d’onde utilisée : 3 000 mètres.
Une boucle d’asservissement permet de vérifier la position des trames émises par toutes les stations en comparant les signaux reçus par l’antenne monitoring avec ceux du générateur de trames, une deuxième boucle d’asservissement permet de contrôler le synchronisme des phases émises par toutes les stations en comparant les signaux reçus par l’antenne monitoring avec ceux fournis par le codeur de phases.
La fonction monitoring, dans une station maître, n’a aucune interférence avec les fonctions pilotage et émission.
Synoptique d’une station esclave
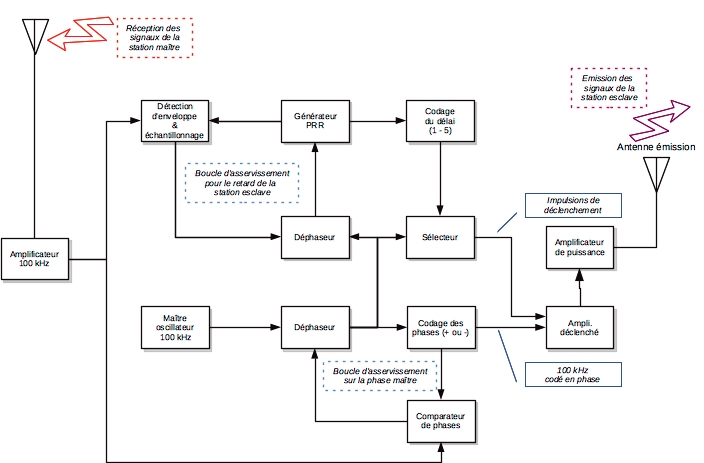
Le signal de sortie 100 kHz du maître l’osillateur est mis en phase (et en fréquence) avec le signal reçu de la station maître grâce à la boucle d’asservissement réalisée par la rétroaction du comparateur de phases.
La boucle d’asservissement d’enveloppe synchronise la sortie du générateur PRR (Pulse Repetition Rate) avec les échantillons d’enveloppe issus du signal maître reçu.
La sortie du générateur PRR est transmise à l’unité de retard dans laquelle le retard de codage attribué à la station esclave est codé.
Les impulsions PRR sont utilisées pour provoquer une émission avec forme d’onde non codée à 100 kHz. Ces signaux sont ensuite combinés avec la phase codée du 100 kHz pour former l’excitation de l’émetteur.
Avec cette méthode, l’enveloppe émise par la station esclave ainsi que les cycles RF sont parfaitement synchronisés avec les signaux maîtres.
La technologie à l’aube des années 40 ne permettait pas de réaliser des boucles d’asservissement statiques. Aussi, des dispositifs électromécaniques furent développés (oui, oui !) pour permettre la fonction déphaseur.
Il est certain que l’emploi des technologies actuelles (circuits digitaux) permettrai aujourd’hui de réaliser les mêmes fonctions de manière plus rentable. Je ne parle pas, en plus, du traitement de signal numérique…
Synoptique d’un récepteur
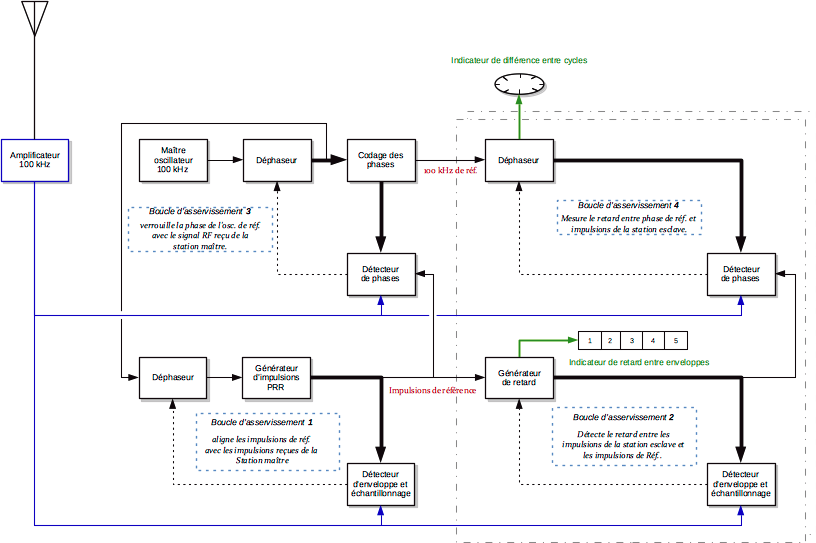
Les signaux LORAN captés par l’antenne sont amplifiés puis transmis simultanément à deux groupes de boucles d’asservissement :
- Les boucles d’asservissement 1 & 2 constituent un système qui mesure la différence de temps entre les enveloppes des stations maîtres et esclaves.
- Les boucles d’asservissement 3 & 4 constituent un système qui mesure les différence de phase entre les signaux RF des stations maîtres et esclaves.
La boucle d’asservissement 1 met en coïncidence le signal issu du générateur PRR avec l’enveloppe du signal de la station maître reçu. Le signal fourni est nommé Impulsions de référence.
La boucle d’asservissement 2 utilise un générateur de retard pour décaler les impulsions de référence pour les amener à coïncider avec les signaux reçus de la station esclave. Le retard introduit est affiché sur un indicateur (Coarse Delay Indicator). L’affichage est grossier, il sera affiné par la suite…
La boucle d’asservissement 3 met en phase les signaux RF fournis par l’oscillateur de référence (100 kHz) avec ceux reçus de la station maître (la porteuse).
La boucle d’asservissement 4 mesure la différence de phase entre les cycles 100 kHz de l’oscillateur de référence et les cycles de 100 kHz extraits des impulsions esclaves reçues et affiche la mesure sur l’indicateur de différence entre cycles. L’affichage est fin. Comme les cycles de l’oscillateur de référence ont été mis en phase avec les cycles des signaux RF maîtres, la boucle d’asservissement 4 mesure la différence de phase entre les cycles RF extraits des impulsions maître et esclave.
Pour simplifier les explications, ne sont pas décrites ci-dessus deux boucles d’asservissement supplémentaires, identiques à la boucle 2 et 4, lequelles sont ajoutées pour effectuer une deuxième lecture du retard de la station esclave.
Tous les récepteurs automatiques mesurent deux différences de temps simultanées en continu, de sorte que des informations de correction sont disponibles en permanence lorsque le récepteur effectue un suivi automatique.
Les deux mesures de différence de temps peuvent être introduites dans une unité de traitement automatique pour pour obtenir toute sortes d’informations de navigation, telle que la direction à suivre, la latitude et la longitude, ou une détermination de position.
La procédure normale d’utilisation du récepteur LORAN-C consiste à lire les affichages de différence de temps et à tracer les positions actuelles sur une carte LORAN-C.
Certains récepteurs ont la capacité de rechercher automatiquement le signal maître et esclave; les identifier par leurs codes de phase puis suivre sans l’aide de l’opérateur.
D’autres récepteurs, plus anciens, nécessitent une assistance de l’opérateur pour positionner les impulsions d’échantillonnage en coïncidence temporelle avec les impulsions de la balise maître. La plupart de ces récepteurs sont équipés d’un tube à rayons cathodiques permettant à l’opérateur de piloter le récepteur dans la recherche.
Les récepteurs sont équipés de plusieurs dispositifs d’alarme :
- Perte de signal LORAN.
- Multitrajets entre l’onde de ciel et l’onde de sol.
- Incohérence de plus de 5 microsecondes entre l’enveloppe et les impulsions.
Conclusions
Bien que développé dans l’urgence le LORAN sera le sytème de navigation hyperbolique qui aura duré le plus longtemps. Ce jour encore on songe à le maintenir en service comme moyen de secours au cas où une défaillance du système GPS venait à se produire. La mise en service opérationnelle de GALILEO sonnera vraisemblablement l’heure de son démantèlement complet; les deux systèmes de navigation par satellites étant redondants et utilisables en secours si l’un d’eux venait à tomber en panne.
Né en 1940, le LORAN aura préfiguré tous les autres systèmes de navigation hyperboliques qui lui succédèrent jusqu’à leur démantèlement progressif après l’arrivée du G.P.S..
Bibliographie :
- Historique du LORAN
- Système LORAN-C par A. Charbonnel – ENMM Le Havre.
- eLoran System Definition and Signal Specification Tutorial
THE LORAN-C SYSTEM OF NAVIGATION – Jansky & Bailey – 1962(lien mort)