
La navigation hyperbolique avec le DECCA
Définition d’une hyperbole
La navigation hyperbolique s’appuie sur les propriétés mathématiques des hyperboles bifocales. Wikipédia les définit ainsi : « L’hyperbole est le lieu géométrique des points dont la différence des distances aux deux foyers est constante ».
Soit M et V deux stations situées dans un même plan.

Soit  , la distance de
, la distance de  à
à 
L’ensemble des points  du plan tels que⎟
du plan tels que⎟ ⎟
⎟ ( a étant un réel) représente une hyperbole pour
( a étant un réel) représente une hyperbole pour  .
.
Par conséquent, quelles que soient les coordonnées du point et pour  constant, l’opérateur sait que le point de station se situe sur une seule et même hyperbole parmi toutes celles possibles entre les deux émetteurs.
constant, l’opérateur sait que le point de station se situe sur une seule et même hyperbole parmi toutes celles possibles entre les deux émetteurs.
Utilisation d’une hyperbole pour se positionner
Soit deux émetteurs (M & V) émettant chacun un signal (porteuse pure), le signal de chaque station est représenté par une courbe noire et une autre verte.

En tout point de la zone de couverture un mobile  peut mesurer le déphasage entre les deux signaux reçus.
peut mesurer le déphasage entre les deux signaux reçus.
Le mobile peut en conclure que : 
avec
 est un entier = différence du nb. de cycles reçus lors de la réception des signaux émis par les deux stations (inconnu de l’opérateur).
est un entier = différence du nb. de cycles reçus lors de la réception des signaux émis par les deux stations (inconnu de l’opérateur). la période du signal après réception et traitement,
la période du signal après réception et traitement, la vitesse de la lumière (
la vitesse de la lumière ( m/s)
m/s) le déphasage entre les deux signaux.
le déphasage entre les deux signaux.
Le mobile peut évaluer la distance 
L’ensemble des points répondant à ces conditions sont situés sur un réseau d’hyperboles.
La distance entre les deux stations émettrices étant supérieure à la longueur d’onde du signal émis  , la mesure du déphasage entre les signaux des deux stations est ambigue : il existe, dans le réseau d’hyperboles plusieurs points satisfaisant la relation situés sur des hyperboles différentes , c’est l’entier qui détermine l’hyperbole sur laquelle se trouve le mobile. Afin d’éviter des calculs fastidieux, des cartes spéciales sur lesquelles sont tracées les hyperboles permettent de faire le point.
, la mesure du déphasage entre les signaux des deux stations est ambigue : il existe, dans le réseau d’hyperboles plusieurs points satisfaisant la relation situés sur des hyperboles différentes , c’est l’entier qui détermine l’hyperbole sur laquelle se trouve le mobile. Afin d’éviter des calculs fastidieux, des cartes spéciales sur lesquelles sont tracées les hyperboles permettent de faire le point.
Or le mobile ne peut déterminer à priori. La navigation avec le DECCA nécessite de connaître ses coordonnées de départ et de suivre à intervalles réguliers sa progression. Ainsi le mobile connait dès son départ et les intervalles sont suffisamment rapprochés pour déduire en permanence l’entier.
Connaitre l’hyperbole sur laquelle le mobile se trouve n’est pas suffisant pour déterminer le point.
Un troisième station R émet également un autre réseau hyperboles.
En mesurant le déphasage entre les signaux reçus de la station M et la station R, le mobile peut déterminer sur quelle hyperbole (rouge) il se trouve selon la même méthode que celle décrite pour les hyperboles vertes..
La position du mobile se trouve alors à l’intersection des deux hyperboles R et V.
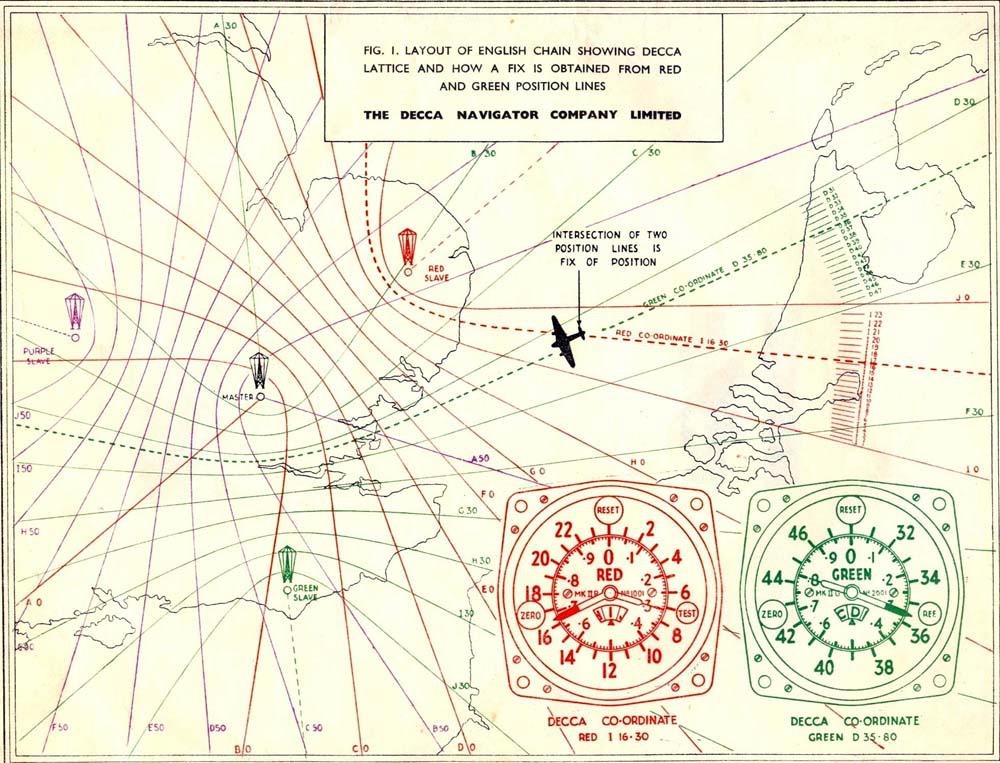
Pour permettre d’affiner les mesures une troisième station d’émission Violette permet de mesurer un troisième déphasage  .
.
L’ensemble des 3 stations s’appelle une chaîne.
Caractéristiques des chaînes DECCA dans le monde.
La synchronisation des stations
Au début du développement du DECCA on ne disposait pas d’horloges suffisamment précises pour piloter chaque station d’émission et la mesure des déphasages eut été entachée d’importantes erreurs.
Pour pallier à cet inconvénient le signal émis par la station Maître était réémis avec un décalage de fréquence fixe par les stations esclaves. Les stations exclaves étaient donc asservies sur la porteuse de la station Maître sans nécessiter l’emploi d’horloges à très haute stabilité.
Pour permettre la discrimination des stations lors de la réception, chaque station émettait sur une fréquence multiple d’une fréquence fondamentale ( pour le débarquement). Pour chaque chaîne la fréquence fondamentale était différente.
pour le débarquement). Pour chaque chaîne la fréquence fondamentale était différente.
 pour la station Maître, soit 84 kHz.
pour la station Maître, soit 84 kHz. pour la station Rouge, soit 112 kHz.
pour la station Rouge, soit 112 kHz. pour la station Verte, soit 126 kHz.
pour la station Verte, soit 126 kHz. pour la station Violette, soit 70 kHz.
pour la station Violette, soit 70 kHz.
Pour permettre la comparaison de phase des deux signaux reçus, il était nécessaire des les ramener à la même fréquence. Dans les récepteurs, en multipliant chaque signal par un coefficient (entier) on arrivait ainsi à pouvoir comparer la phase relative des deux sinusoïdes reçues :
- Le PPCM des coefficients multiplicateurs des stations Maître et Rouge étant 24, les signaux reçus dans les récepteurs étaient multipliés respectivement par 4 et 3 pour obtenir deux signaux à
 (soit 336 kHz) dont on pouvait alors mesurer le déphasage.
(soit 336 kHz) dont on pouvait alors mesurer le déphasage. - Le PPCM des coefficients multiplicateurs des stations Maître et Verte étant 18, les signaux reçus dans les récepteurs étaient multipliés respectivement par 3 et 2 pour obtenir deux signaux à
 (soit 252 kHz) dont on pouvait alors mesurer le déphasage.
(soit 252 kHz) dont on pouvait alors mesurer le déphasage.
Ainsi de suite… Voir le synoptique de principe des récepteurs.
 Le déphasage était mesuré à l’aide de cadrans électromécaniques à plusieurs aiguilles, permettant ainsi une grande résolution de la mesure.
Le déphasage était mesuré à l’aide de cadrans électromécaniques à plusieurs aiguilles, permettant ainsi une grande résolution de la mesure.
Par la suite un perfectionnement supplémentaire fut rajouté sous la forme d’un compteur se déclenchant à chaque passage d’une hyperbole et indiquant l’entier .
En 1947 on introduisit un dispositif d’identification. Bien que imparfait il rendit de nombreux services pour les mobiles lents.
Bibliographie :