
Le G.P.S. (5) – Les récepteurs
(Document réalisé en 2015). Document faisant suite à La propagation
- L’antenne
- Le récepteur
- La tête HF
- Première translation de fréquence
- Première FI
- Deuxième translation de fréquence
- Deuxième FI
- Le corrélateur
- Procédé de corrélation
Avertissement : ce chapitre fait appel a des notions de radioélectricité élémentaires. Les lecteurs qui ne posséderaient pas ces connaissances pourront passer ce chapitre ou ne retenir que les informations qui leurs seraient compréhensibles.

Constitution des récepteurs G.P.S.
L’antenne
Généralement semi-omnidirectionnelle (lobe = 1/2 sphère), l’antenne est soit incorporée à l’unité (cas des récepteurs terrestres grand public), soit déportée (cas des aéronefs, des automobiles, des bateaux, etc.). Dans ce dernier cas, un coaxial relie l’antenne au récepteur et des mesures particulières doivent être prises pour compenser l’atténuation ainsi que le temps de propagation dans le coaxial.
La plupart des antennes G.P.S. pour aéronefs sont de type patch.
Certains blocs compacts antenne + récepteur G.P.S. sont désignés sous le vocable d’antennes G.P.S. Ces ensembles miniatures connectés via une liaison USB à un ordinateur sont bien un récepteur complet. Leur appellation d’antenne est un abus de langage.


Certaines antennes contiennent un amplificateur RF à faible bruit, assurant une amplification du signal RF au plus près de l’antenne (antennes actives). Ainsi le signal pourra être transmis au récepteur avec un minimum de dégradations. Le gain de l’antenne peut varier de 3 à 35 dB.
Enfin certains récepteurs utilisent une antenne hélice. C’est fréquemment le cas des récepteurs monobloc. Lors de l’emploi de cette antenne il est recommandé de l’orienter en position verticale. Ainsi le lobe principal de l’antenne est dirigé vers l’axe de réception des signaux émis par les satellites le plus probable.
Le récepteur
De nombreuses solutions de réception G.P.S. existent; les décrire toutes nécessiterai un site Internet complet. Le présent paragraphe ne décrit que le principe général de ce type de récepteur. Dans le cas présent, sera étudié le synoptique de principe d’un récepteur « civil », lequel n’aura que le code C/A à décoder.
Le principe décrit est celui d’un récepteur multiplexé.
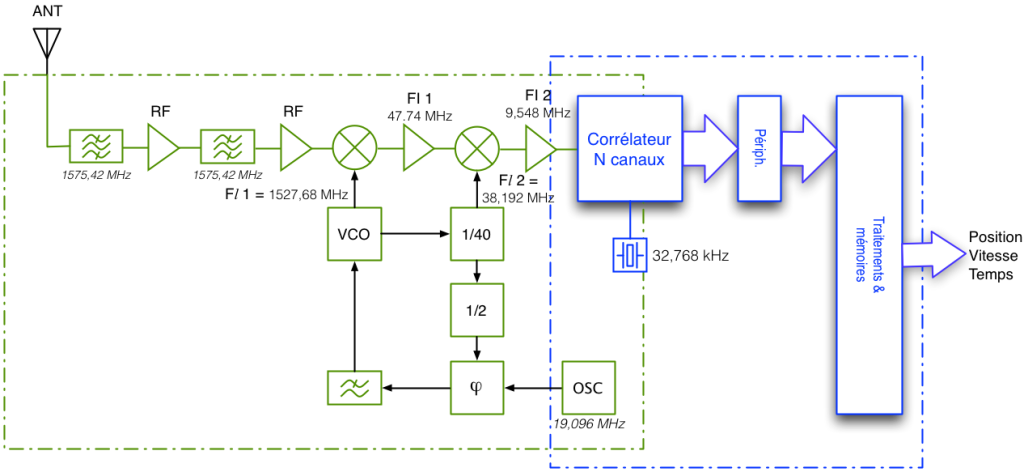
La tête HF
Constitué de deux filtres passe-bande et de deux étages amplificateurs à faible bruit, le premier amplificateur est le plus critique, car de son facteur de bruit dépend la qualité de la réception. Son gain est d’environ 15 – 20 dB.
Le deuxième amplificateur RF possède un gain d’environ 3 dB, ce qui n’augmente que peu le facteur de bruit global des deux amplificateurs. Les filtres HF sont généralement en technologie céramique. Ils sont destinés à éliminer les raies spectrales indésirables et à rejeter les fréquences images.
Leur bande passante est calculée de manière à ne pas atténuer ni déphaser les bandes latérales les plus éloignées de la porteuse.
1ère translation de fréquence
Le premier mélangeur reçoit les signaux amplifiés et la fréquence locale 1 générée par un VCO. Ce dernier est stabilisé par une boucle à verrouillage de phase (VCO + diviseurs + filtre de boucle + oscillateur de référence).
Le filtre de boucle est du deuxième ordre. L’oscillateur de référence est un oscillateur à quartz compensé en température (TCXO).
La fréquence locale 1 Floc1 = 1527,68 MHz (récepteur infradyne).
Par mélange (L1 avec Floc1) on obtient, parmi les produits du mélange, la première fréquence intermédiaire.
Par filtrage après le mélange, on ne retient que FI1, soit 47,74 MHz. La fréquence image est fortement rejetée grâce à l’emploi d’un mélangeur à cellules de Gilbert. Ce type de mélangeur est facile à intégrer.
1ère fréquence intermédiaire
Le filtre de FI1 présente une fréquence centrale F0 = 47,74 MHz, et une bande passante typique de 15 MHz. L’amplificateur FI1 présente un gain typique de 25 dB, avec une plage de contrôle de gain de 40 dB.
2ème translation de fréquence
Là encore on utilise un mélangeur à cellule de Gilbert. La fréquence locale Fl2 est obtenue en divisant par 40 la fréquence locale Fl1. Par filtrage après le mélange, on retient que FI2, 9,548 MHz (+- les bandes latérales).
2ème fréquence intermédiaire
L’amplificateur FI2 présente une bande passante de ± 5,0 MHz en sortie. Un dernier filtrage réduit le bruit avant conversion analogique/Numérique.
Le corrélateur
On remarque dans ce synoptique que tous les signaux de la constellation G.P.S. « en vue » sont reçus au travers du même récepteur. En sortie du 2éme étage de fréquence intermédiaire on a donc une somme des pseudo-bruits (codes C/A) émis par ces satellites.
Fort heureusement les récepteurs connaissent les pseudo-bruits (seuls les pseudo-bruits en Code Y(P) sont secrets). Pour discriminer chacun des signaux caractéristiques de chaque satellite, la seule méthode consiste à utiliser un corrélateur qui va chercher à mettre en phase le signal reçu d’un satellite avec son code (C/A dans cet exemple).
Les corrélateurs ont la faculté de trouver un signal utile alors qu’il est « noyé » dans le bruit ou fortement perturbé (par un autre pseudo-bruit par ex.).
Le signal issu de FI2 est envoyé en parallèle dans des canaux séparés. Le nombre de satellites pouvant être suivis simultanément dépend du nombre de canaux de traitement disponibles. Chaque canal de traitement présentera ses informations à une unité de calcul, laquelle pourra ensuite fournir position, vitesse et temps.
Note : les canaux de traitement peuvent aussi bien être physiques (hardware) que logiciels (soft)…
Procédé de corrélation
 Avant toute opération de corrélation, le récepteur synchronise parfaitement son horloge interne avec le temps atomique des satellites.
Avant toute opération de corrélation, le récepteur synchronise parfaitement son horloge interne avec le temps atomique des satellites.
Le calcul de la position du récepteur s’effectue à partir du temps mis par les ondes radio (L1 et L2) pour parcourir le chemin satellite – récepteur. La vitesse de propagation de la lumière étant constante, il est aisé d’en déduire les distances satellites – récepteurs.
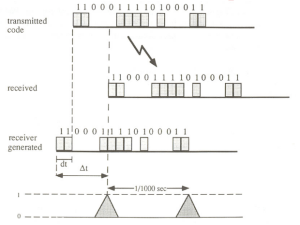
Le corrélateur va donc fabriquer une réplique du code C/A pour le satellite dont il souhaite mesurer la distance, puis il va comparer ce code avec la somme des signaux reçus de la constellation (FI2).
Si la réplique du code ne coïncide pas en phase avec les signaux reçus, le corrélateur va décaler la phrase C/A qu’il a fabriquée d’un bit, puis recommencer la comparaison.
Lorsque la réplique du code C/A sera en phase avec le signal cherché dans le bruit, un pic d’énergie apparaît en sortie du corrélateur.
A ce moment l’unité de calcul va comparer la datation de la phrase émise par le satellite avec le temps local et en déduire la distance satellite – récepteur.
Ce processus, itératif, se répète autant de fois que le récepteur possède de canaux de traitements. Puis, une nouvelle phrase est analysée correspondant à une nouvelle position du récepteur si celui-ci se déplace.
Note : Ce principe, archaïque mais cité à titre d’exemple, tend à être remplacé par des procédés beaucoup plus performants faisant appel au traitement numérique du signal (FFT, transformée de Walsh, conception systolique, etc.). Les études sont en cours, les constructeurs communiquent peu ;-)…
Première acquisition
A la mise sous tension le récepteur G.P.S. ne connaît pas l’état de la constellation. Il ne peut donc procéder à une poursuite comme décrit ci-dessus.
Le récepteur va donc « essayer » une corrélation avec chaque satellite jusqu’à ce qu’il obtienne l’extraction d’un message de navigation.
C’est à cet instant qu’il aura connaissance des orbites, des almanachs et qu’il pourra synchroniser son horloge avec celle du satellite.
Suivant l’heure et le lieu de mise sous tension, le processus peut prendre 5 à 20 minutes.
Précédent : La propagation des signaux G.P.S. – Suivant : Principe du positionnement