
Le DECCA
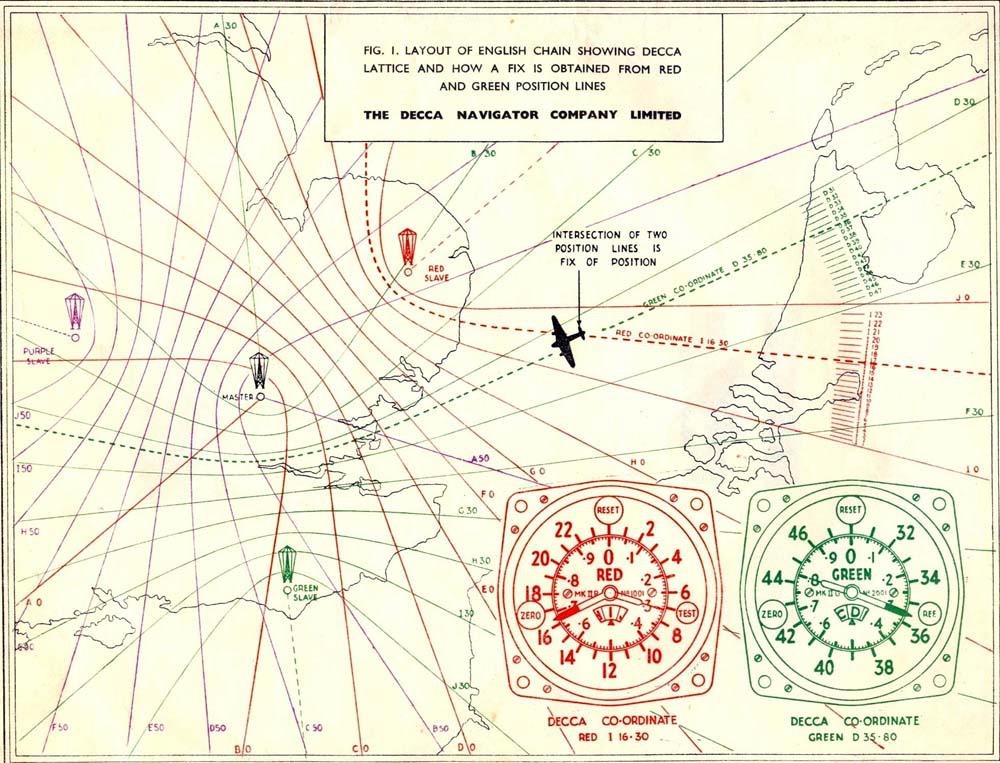
Le système DECCA est un système de radionavigation hyperbolique qui a été mis en oeuvre au Royaume-Uni après la Seconde Guerre mondiale et utilisé plus tard dans de nombreuses régions du monde. Il fonctionnait en mesurant les différences de phase entre les signaux continus d’une station maître et d’une station esclave. Ces différences étaient ensuite reportées à des lignes hyperboliques imprimées sur des cartes spécifiques. En traçant les lectures de deux paires d’hyperboles à un instant particulier, les utilisateurs pouvaient déterminer leur position instantanément.
Le système utilisait des groupes d’au moins trois stations émettrices côtières appelées chaînes fonctionnant dans la bande de fréquences 70-130 kHz. Chaque chaîne est composée d’une station maître et de deux ou trois stations esclaves, généralement situées entre 80 et 110 km de la station maître.
La précision du DECCA variait de 50 mètres pendant la journée à 200 mètres la nuit. Elle pouvait diminuer jusqu’à 800 mètres à mesure que la distance par rapport à la ligne de base augmentait. La précision était également affectée par les effets saisonniers qui altéraient la précision d’un facteur de 6 à 8. La portée de jour maximum pour le DECCA était de 300 à 400 miles avec une reproductibilité de 200 mètres. La nuit, la portée était garantie à 240 NM par l’Amirauté Britannique.
La difficulté de naviguer avec un dragueur de mines de l’autre côté de la Manche et de faire un atterrissage précis de nuit était considérée comme impossible sans l’aide d’un système de radionavigation précis (seule l’Allemagne avait inventé la navigation inertielle à cette époque).
Établi sur la côte sud de l’Angleterre, DECCA a commencé à émettre la veille du débarquement. Si cette aide à la radionavigation n’avait pas été disponible, on suppose que le jour J aurait suivi un plan de débarquement complètement différent.
Historique
Le système DECCA a trouvé ses origines aux États-Unis, mais a ensuite été développé et déployé par Decca Radio and Television Ltd. situé à Londres.
A l’origine, il a été conçu par un Américain, W (Bill). J. O’Brien en tant que méthode de mesure de la vitesse sol des aéronefs lors des essais et a simplement été nommé «indicateur de position d’aéronef». Ignorant les brevets de Harms ou d’Honore et sans même être au courant des développements aux États-Unis par Shanklin, Donnelly et Holmes, O’Brien a travaillé sur le système indépendamment de 1936 à 1939. Il n’a pas réussi à susciter l’intérêt des États-Unis, des forces armées ou les autorités civiles. Le système est tombé en désuétude jusqu’au début de la guerre en 1939. À ce moment là il a offert l’idée au ministère britannique de l’Air avec l’aide de son ami HF Schwarz, un Américain travaillant à Londres pour Decca Record Company. Aucun d’entre eux n’était au courant des travaux en cours sur les systèmes de navigation à impulsions en Grande-Bretagne (GEE et LORAN), de sorte que l’idée a été rejetée par Watson-Watt aux motifs qu’elle était sujette à brouillage et aux interférences.
O’Brien et Schwarz, avec le soutien de Decca, ont ensuite testé un prototype en Californie en utilisant un émetteur maître à 300 kHz et un esclave à 600 kHz. La comparaison a été faite à 1200 kHz et la précision du système a été démontrée en utilisant une voiture. L’essai a prouvé la viabilité du système et constituait un plus important par rapport aux propositions antérieures en utilisant des fréquences radio harmoniquement liées. Ceci a permis de résoudre les problèmes d’identification et de comparaison de phases des ondes porteuses sans nécessiter de modulation. C’était une solution aboutie et qui présentait l’avantage supplémentaire d’occuper une bande passante très étroite et d’utiliser une faible puissance pour les émissions.
L’amirauté britannique, qui avait commencé à planifier des atterrissages en France, avait besoin d’un système de navigation précis, aussi commença-t-elle à s’intéresser au DECCA en 1941. Il y avait également un besoin pour un système de navigation de secours en redondance du système GEE existant.
Une nouvelle impulsion a donc été donnée au développement du DECCA.
Des essais ont été effectués au large d’Anglesey au milieu de l’année 1942, en utilisant les mêmes fréquences et le même équipement que ceux utilisés en Californie. Cet essai a été couronné de succès et a donné lieu à d’autres recherches avec l’aide de l’Admiralty Signals Establishment (ASE).
Au début de mars 1943, Decca reçut une commande pour produire 27 récepteurs plus le pilote ainsi que les unités de contrôle de phase nécessaires aux émetteurs. Tous les équipements ont été livrés à la mi-mai lorsque la Royal Navy a commencé à s’entraîner et à se préparer sérieusement.
En janvier 1944, un test du DECCA (ou QM comme on l’appelait alors) sur de nouvelles fréquences a été effectué dans la mer d’Irlande et il a également été comparé avec le système Royal Air Force GEE pour la précision.
Decca était plus convivial et plus précis que le GEE parce que les relevés étaient affichés directement sur des cadrans d’horloge appelés «décometers» (décomposeurs) au lieu d’un tube à rayons cathodiques comme cela était le cas dans GEE (et dans le LORAN aussi).
Pour l’opération Neptune (D Day), quatre stations d’émission DECCA ont été mises en place dans le plus grand secret. Un haut niveau de secret entourait la construction des émetteurs, car la connaissance de leur emplacement pouvait trahir le lieu choisi pour les plages de débarquement. Il a ensuite (après guerre) été révélé que la station maître, appelée «A», a été construite près de Chichester. La station «B» (esclave rouge) à l’ouest près de Swanage dans le Dorset et «C» (l’esclave vert) à environ un mille à l’intérieur des terres de Beachy Head. Sur l’île de Sheppey, un émetteur a été construit pour ressembler à un «leurre» au cas où les Allemands découvriraient une partie du plan. Après la guerre, il est devenu habituel d’établir un quatrième émetteur (violet) pour plus de précision, mais cela n’a pas été jugé nécessaire pour le jour J.
Les signaux des émetteurs Rouge et Vert formaient des hyperboles. Ces dernières ont été tracés sur des cartes. Des femmes étaient responsables du calcul de ces hyperboles DECCA, elles travaillaient deux par deux dans une « cabane » à l’ASE. Leur travail était si secret qu’un garde armé était en faction en permanence.
Dix-neuf récepteurs DECCA de pré-série ont été fabriqués par la société dans des délais très courts. Ils équipèrent douze flottilles de dragueurs de mines, cinq engins de débarquement et de deux motors launch.
Les transmissions de la chaîne a commencé dès le 5 juin. Bill O’Brien, développeur de Decca, a gardé un prototype récepteur allumé dans sa maison de Londres. Quand les cadrans du décodeur ont pris vie, il savait que le débarquement était en cours. Il y avait aussi des récepteurs de surveillance installés à terre.
Peut-être parce que c’était très secret, ou peut-être parce que peu de publicité a été faite par rapport à GEE, l’utilisation du DECCA dans l’opération Neptune n’a pas été mentionnée dans les rapports.
Au grand dam des dragueurs de mines, qui auraient pu en faire bon usage, la chaîne DECCA a été éteinte le jour J plus un, vraisemblablement parce que le système était très secret à l’époque. Certains ont pensé qu’il était fermé en raison de problèmes d’émetteurs. Le système DECCA n’a jamais été en panne et, autant qu’on ait pu le constater, son existence pendant la guerre n’a jamais été suspectée par les Allemands.
Après guerre
En 1945, Decca Navigator Co, Ltd a été créée, et la première chaîne commerciale de stations établie dans le sud-est de l’Angleterre en 1946. Dans les années 1960, Decca a déployé des efforts considérables pour que l’OACI l’adopte en tant que moyen de navigation aéroporté standard plutôt que le VOR / DME. C’était une initiative très sérieuse qui avait même prévu la création de chaînes spéciales aux États-Unis, mais en vain. Outre les investissements considérables déjà faits pour les VOR / DME, les problèmes techniques plus importants pour les avions que pour les navires, jouèrent en sa défaveur, et il y eût aussi le fait que, avec une portée faible d’environ 200 milles, une seule chaîne DECCA nécessitant quatre émetteurs couvrait un tout petit peu plus de surface qu’une seule installation VOR / DME…
En 1975, MH Schwarz, directeur général de Decca Navigator, a admis que Loran-C était probablement meilleur que DECCA et que la navigation par satellite serait, par la suite, meilleure que l’un et l’autre.
Bien que le DECCA, en tant que système aéroporté, eût fait peu de progrès, beaucoup d’autres équipements produits par Decca étaient prophétiques et bien en avance sur leur temps. Le concept de navigation de surface (Harco), l’ordinateur de navigation de surface aéroporté (Onmitrac) et l’affichage de la carte de vol (Decca Flight Log) ont tous été créés par Decca. Le système a continué de s’étendre et, en 1989, il comptait 42 chaînes entièrement opérationnelles dans le monde, dont 42 stations maîtresses et 119 émetteurs esclaves.
Malgré le fonctionnement du système avec un budget réduit et le maintien d’une disponibilité de 99,95 % du système, l’heure de la fin était inéluctable. L’avènement des satellites de navigation GPS a lentement rendu le service superflu. En 1999, la GLA a annoncé la fermeture définitive du service à minuit le 31 mars 2000, après plus de 50 ans de service.
Principe
La navigation hyperbolique avec le DECCA
Nous avons vu qu’une chaîne Decca se composait d’une station maître contrôlant en phase trois émetteurs esclaves. Par convention on attribuait une couleur à chaque station :
- Noir pour la station maître,
- Rouge, Vert et Violet pour les stations esclaves.
Les stations esclaves étaient situés à environ 120 degrés l’une de l’autre, dans un rayon de 60 à 100 milles de la station maître. Cela permettait une couverture étendue et, étant donné que les ondes de sol dans cette bande de fréquences ne sont pas trop atténuées, les stations pouvaient être installées à l’intérieur des terres.
Chaque station de la chaîne émettait une onde porteuse non modulée (CW/A0). Les porteuses de la station maître et des stations esclaves étaient toutes en relation harmonique avec une référence de fréquence interne qui était d’environ 14,2 kHz, appelée « f« .
- La station Maître émettant normalement une onde porteuse non modulée (A0) de fréquence 6 x f dans la bande des 85 kHz.
- La station Rouge (esclave) transmettait une onde porteuse non modulée (A0) de fréquence 8 x f dans la bande des 112 kHz.
- La station Verte (esclave) transmettait une onde porteuse non modulée (A0) de fréquence 9 x f dans la bande des 127 kHz.
- La station Violet (esclave) transmettait une onde porteuse non modulée (A0) de fréquence 5 x f dans la bande des 127 kHz.
Les oscillateurs de référence des stations esclaves étaient verrouillés en phase avec celui de la station maître.
Les gammes de fréquences pour les stations maître et esclave étaient :
- 84 à 86 kHz pour les stations maîtres.
- 112 à 115 kHz pour les stations esclaves Rouges.
- 126 à 129 kHz pour les stations esclaves Vertes.
- 70 à 72 kHz pour les stations Violet.
Comme les signaux étaient à ondes continues (CW/A0), un espacement de fréquences de 150 Hz était suffisant pour éviter les interférence entre chaînes.
Caractéristiques des chaînes DECCA dans le monde.
Principe des émetteurs
Comme la station maître émettait une onde entretenue pure sans aucune modulation, le schémas synoptique de principe ne présente aucun intérêt car absolument conventionnel.
Principe des stations esclaves
Nous avons vu précédemment que les stations esclaves avaient leur émission synchronisée en phase avec celle de la station maître.
Avertissement : Il existe très peu de schémas des stations esclaves. Pour ma part je n’en ai pas eu connaissance. Je me bornerai donc à décrire un synoptique de principe pour expliquer leur fonctionnement. Il est certain que le schémas ci-dessous est d’une grande évidence à notre époque de circuits intégrés, mais pensez aux trésors d’imagination que les ingénieurs de l’époque ont dû déployer pour faire des diviseurs avec des heptodes…
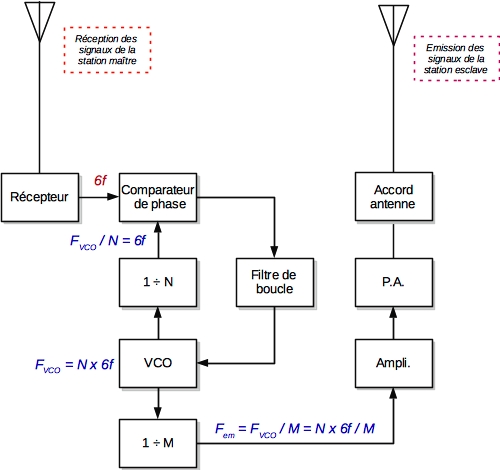
Pour assurer l’asservissement en phase, il est nécessaire de recevoir la fréquence de la station maître et de la comparer avec l’oscillateur pilote de la station esclave. Cette fonction est réalisée à l’aide d’une boucle d’asservissement (Comparateur de phase, filtre de boucle, VCO, diviseur par N).
Le rapport de division N est choisi comme PPCM de la fréquence de la station maître et de la station esclave afin de permettre ensuite l’élaboration de la fréquence émission de la station, quelle que soit la station esclave (5f,8f ou 9f).
L’oscillateur de la station étant synchrone en phase avec la fréquence de la station maître, il suffit de diviser sa fréquence par M pour obtenir la fréquence d’émission de la station esclave.
Soit :
- N=5, M=6, Fvco = 30f pour la station Violet
- N=4, M=3, Fvco = 24f pour la station Rouge
- N=3, M=2, Fvco = 18f pour la station Vert
Ainsi il n’est pas besoin de construire des stations spécifiques pour chaque couleur, il suffit d’un modèle de station unique et on programme N et M à la mise en service.
Principe des récepteurs
Avertissement : je n’ai pu me procurer les schémas d’un type de récepteur DECCA. Tout comme pour les stations d’émission, je me bornerai à décrire un synoptique fonctionnel.

Afin de comparer la phase relative des différentes porteuses émises par les stations d’une chaîne, il est nécessaire de multiplier chacune d’elle afin d’amener leur fréquence au PPCM. Ainsi :
- La porteuse reçue de la station maître (6f) est multipliée par 5 pour être comparée en phase avec la porteuse reçue de la station esclave violet (5f) multipliée par 6. Les deux signaux sont ainsi ramenés à une fréquence égale à 30f, et peuvent être comparés en phase.
- La porteuse reçue de la station maître (6f) est multipliée par 4 pour être comparée en phase avec la porteuse reçue de la station esclave rouge (8f) multipliée par 3. Les deux signaux sont ainsi ramenés à une fréquence égale à 24f, et peuvent être comparés en phase.
- La porteuse reçue de la station maître (6f) est multipliée par 3 pour être comparée en phase avec la porteuse reçue de la station esclave vert (9f) multipliée par 2. Les deux signaux sont ainsi ramenés à une fréquence égale à 18f, et peuvent être comparés en phase.

Afin de réaliser la multiplication de fréquence pour chaque signal, un récepteur superhétérodyne fonctionnant en supradyne effectue les mélanges nécessaires pour obtenir une FI correspondant aux PPCMs souhaités pour réaliser la comparaison de phase (30f, 24f et 18f).
- Récepteur Violet : Floc = 25 x f -> Floc + 5f = 30 f.
- Récepteur Rouge : Floc = 16 x f -> Floc +8f = 24f.
- Récepteur Vert : Floc = 27 x f -> Floc – 9f = 18f (remarquez le choix du mélange inférieur pour obtenir 18f)
- La même logique s’applique pour le récepteur de la fréquence maître.
Les récepteurs ne sont pas équipés d’un étage de détection car c’est le signal issu de leur FI (Fréquence intermédiaire) qui servira à la comparaison de phase.
Les différences de phase mesurées sont affichées sur des afficheurs appelés «décomposeurs» (decometers), les valeurs lues peuvent être reportées sur les cartes spécifiques au DECCA, sur lesquelles les lignes de position sont numérotées dans les mêmes unités que celles montrées sur les décomposeurs.
Chaque décomposeur possède sa propre couleur et la valeur affichée doit être reportée sur l’hyperbole de même couleur sur la carte. L’intersection des deux hyperboles matérialise la position du récepteur.
L’ensemble présentait une incertitude absolue de 4 degrés.
L’affichage à double aiguille permet une grande résolution des valeurs affichées à l’époque où les afficheurs numériques n’existaient pas…

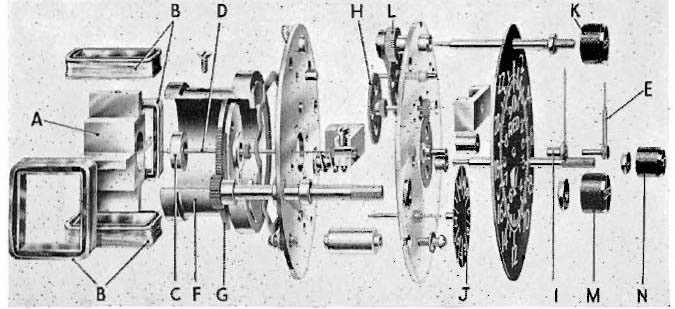 Le principe d’affichage des décomposeurs repose sur l’utilisation d’un dispositif électromécanique (ci-contre à D).
Le principe d’affichage des décomposeurs repose sur l’utilisation d’un dispositif électromécanique (ci-contre à D).
La simplicité d’exploitation des récepteurs DECCA (il suffisait de reporter les indications des décomposeurs sur une carte spécifique) a assuré un certain succès pour ce système de navigation.
Plus adapté au monde maritime qu’à l’aéronautique, il a longtemps été plébiscité par des générations de marins.
Evolutions
Avec l’arrivée des semi-conducteurs et des techniques numériques l’aspect des équipements DECCA a fortement changé.
Les afficheurs numériques ont fait leur apparition, les microprocesseurs ont assuré le calcul automatique de la position en exprimant les coordonnées latitude/longitude, quelques équipements aéronautiques spécifiques ont vu le jour.



Conclusion
Malgré la disponibilité gratuite du positionnement GPS, le retrait du service du DECCA a été regretté par certains secteurs de l’industrie maritime. Plus particulièrement, les pêcheurs appréciaient la capacité du DECCA à les guider vers des lieux de pêche en mer avec une précision qui n’est disponible que maintenant grâce aux services GPS depuis la suppression du S/A. D’autres secteurs de la communauté maritime regrettent la perte d’un service de positionnement totalement indépendant des satellites. La disparition de Decca Navigator n’a pas beaucoup affecté la communauté aéronautique parce que les installations à bord des aéronefs étaient moins courantes que celles du VOR / DME, le système internationalement reconnu de localisation.
Bibliographie :