
Le D.M.E.
Le DME (Distance Measuring Equipment) est un instrument de radionavigation indiquant la distance séparant un aéronef d’une balise au sol.
Il se compose :
- d’un interrogateur à bord de l’aéronef,
- d’un transpondeur au sol (balise). Sa position géographique ainsi que ses caractéristiques (fréquence, indicatifs, etc.) sont connues et documentées.
Les station sol (balises) sont souvent co-localisées avec des balises V.O.R. permettant ainsi la connaissance exacte de la position de l’aéronef (QDM avec le VOR et distance avec le DME).
Les balises DME peuvent aussi être co-localisées avec les ILS, fournissant ainsi une information de distance précise et continue par rapport à l’entrée de piste, contrairement aux markers, lesquels ne permettent de connaître que le survol de 3 points lors d’une descente vers la piste.
- La puissance typique d’une balise DME est de :
- 1 à 5 kW crête pour les balises « en route »
- 100 W crête pour les balises d’approche (max. 60 NM ou 110 km).
- La bande de fréquences s’étend de 960 à 1215 MHz – Bande C – L.
- La portée maximum est de 200 NM.
- La puissance émission d’un interrogateur est typiquement comprise entre 700 W et 2 kW crête.
- Un transpondeur DME est capable de répondre à 100 interrogateurs.

L’information de distance est déduite de la mesure du temps écoulé entre l’émission de l’interrogateur (à bord de l’aéronef) et la réception de la réponse émise par le transporteur sol (la balise).
En complément le DME peut fournir une indication de vitesse radiale par rapport à la balise sélectionnée. Cette information peut se déduire soit de l’effet Doppler, soit de la vitesse de variation de la distance…
Le temps par rapport à la destination (balise sol DME) peut également être affiché.

Historique
est né à Newcastle (Nouvelle-Galles du Sud) en 1919. Après des études en génie mécanique et électrique à l’université de Sydney, il a mené des projets de recherche dans les laboratoires de radiophysique du CSIRO sur le campus de l’université.
Entre 1941 et 1945, il conçoit et construit des RADARs dans les laboratoires de radiophysique du CSIRO et les intègre sur des navires et des aérodromes de la RAAF.
De 1946 à 1948, James Gerrand (« Gerry ») travaille pour le TAA en tant qu’ingénieur en radiocommunications, concevant et validant de nouveaux équipements de mesure de distance (DME) destinés à être utilisés entre des avions et des tours de contrôle. En juillet 1946, il est envoyé aux États-Unis avec l’équipe d’experts de la TAA pour approuver l’achat du premier avion DC4 Skymaster d’Australie.
Un article publié en 1947 intitulé « Young Engineer Develops New Air Safety Device » on y lit: « Un dispositif destiné à renforcer la sécurité de la navigation aérienne a été mis au point en Australie par MJH Gerrand, ingénieur scientifique âgé de 28 ans, lequel a effectué des recherches sur le RADAR à Sydney pendant la guerre ».
Adopté par l’Organisation Provisoire de l’Aviation Civile Internationale (OPACI), le dispositif sera installé sur tous les aéronefs des compagnies aériennes civiles contrôlés par des pays liés à l’organisation.
Une autre version technique du système a été déployée par Amalgamated Wireless Australasia Limited au début des années 1950 dans la bande VHF à 200 MHz.
Le Département fédéral de l’aviation civile a qualifié cette version australienne de DME-D (ou DME Domestic), et la dernière version internationale a été adoptée par l’OACI sous le nom de DME.
Le DME en France
À l’issue de la seconde guerre mondiale, l’OPACI puis l’OACI entérine les grands systèmes de radionavigation internationaux dont le VOR et le DME. Or, la France ne possède pas encore la maîtrise de ces équipements.
À l’instar du VOR, des sociétés, des laboratoires et des ingénieurs vont se mettre à la tâche. Dès les années 1950 les premiers DME sont installés sur les aérodromes principaux.
Principe du DME
Le DME mesure et affiche la distance séparant l’antenne du récepteur de l’aéronef par rapport à la balise sol. Cette distance mesurée est appelée « distance oblique »; c’est à dire qu’elle ne représente pas la distance projetée au sol mais l’hypoténuse d’un triangle rectangle représenté par la verticale sol de l’aéronef, l’aéronef, la balise.

On constate que plus l’avion se rapproche de la station, moins la distance mesurée représente la distance projetée sur le sol (ou sur une carte), mais l’hypoténuse d’un triangle rectangle. À la verticale de la balise DME l’indicateur n’affiche plus que la hauteur sol.
Toutefois si le pilote ou ses instruments connaissent la hauteur sol de l’aéronef, la distance projetée au sol est donnée par la relation :

En réalité l’erreur de mesure est négligeable étant donné les distances et les altitudes auxquelles les aéronefs volent dans ce type de configuration.
Le principe de cette mesure de distance repose sur le chronométrage du temps de propagation des ondes radioélectriques entre l’aéronef et la balise DME.
Un équipement situé dans l’aéronef, appelé interrogateur, émet des impulsions de manière omnidirectionnelle. Ces impulsions émises par l’interrogateur sur un canal donné sont appelées interrogations.
Le impulsions d’interrogations, reçues et décodées par la balise DME (au sol), appelée transpondeur, sont ré-émises omnidirectionnellement avec un retard constant de  et un décalage de fréquence de
et un décalage de fréquence de  .
.
La distance entre l’interrogateur et la balise DME est donné par la relation :

Avec :
 : temps écoulé entre l’interrogation et la réception de la réponse.
: temps écoulé entre l’interrogation et la réception de la réponse. : vitesse de la lumière.
: vitesse de la lumière. correspond au retard constant entre la réception d’une interrogation et l’émission de la réponse au niveau de la balise DME.
correspond au retard constant entre la réception d’une interrogation et l’émission de la réponse au niveau de la balise DME.
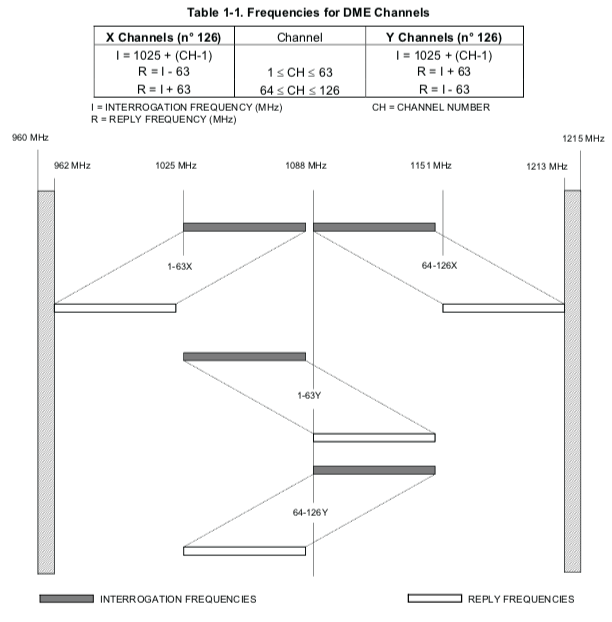
Les fréquences DME
La bande de fréquences allouée aux DME s’étend de 962 à 1215 MHz.
Les interrogations ainsi que les réponses utilisent un couple de fréquences appelé canal.
Le canal utilisable correspond à une fréquence couplée avec celle d’une balise VOR ou ILS sélectionnée par l’opérateur à bord de l’aéronef. La fréquence DME est appariée de façon automatique avec le VOR ou l’ILS auquel il est associé.
Table des canaux / fréquences DME (aller pages 3-105 et suivantes).
Sur certains interrogateurs DME le couplage entre VOR/ILS et DME n’est pas disponible. La boîte de commande est alors accessible sur le panneau avant et permet de sélectionner le canal désiré.
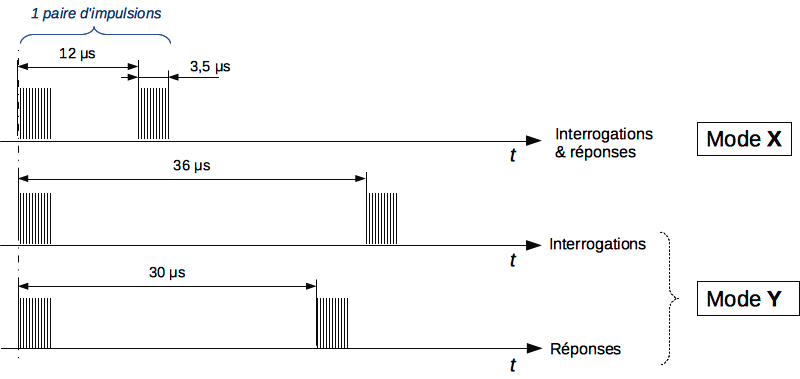
L’interrogation DME
L’interrogation DME est constituée de deux impulsions espacées de 12  (Mode X) ou 36 (Mode Y) et de durée 3,5 . L’espacement (le mode) dépend du canal sélectionné (voir table des fréquences / canaux ci-dessus).
(Mode X) ou 36 (Mode Y) et de durée 3,5 . L’espacement (le mode) dépend du canal sélectionné (voir table des fréquences / canaux ci-dessus).
Le temps de montée des impulsions est égal à leur temps de descente, il est inférieur à 2,5 
Tant qu’aucune réponse n’a été décodée l’interrogateur (bord) émet des trames à la cadence de 120 à 150 / secondes. L’interrogateur est en mode recherche.
Une fois qu’il a identifié les premières réponses, la cadence d’interrogation est de 20 à 30 / secondes. L’interrogateur est alors en mode poursuite.
Ces cadences représentent une fourchette moyenne des cycles d’interrogation. Instantanément les interrogateurs DME émettent les interrogations avec une récurrence aléatoire. Ce point important sera détaillé par la suite…

La réponse DME
En réponse à une interrogation reçue, la balise DME (transpondeur) transmet, avec un retard constant de  et une fréquence décalée de ± 63 MHz de la fréquence d’interrogation, une paire d’impulsions espacées de
et une fréquence décalée de ± 63 MHz de la fréquence d’interrogation, une paire d’impulsions espacées de  (Mode X) ou
(Mode X) ou  (Mode Y).
(Mode Y).
Les balises DME sont en mesure de répondre à 100 avions simultanément (valeur de crête).
Après réception d’une interrogation DME valide (c’est-à-dire après la réception de la deuxième impulsion), le récepteur de la balise ne traite aucune interrogation supplémentaire pendant  afin de ne pas déclencher à nouveau sur sa propre réponse transmise. Le récepteur ne traite pas de nouvelles impulsions d’interrogation tant que la double impulsion de réponse n’a pas été entièrement transmise.
afin de ne pas déclencher à nouveau sur sa propre réponse transmise. Le récepteur ne traite pas de nouvelles impulsions d’interrogation tant que la double impulsion de réponse n’a pas été entièrement transmise.
L’intervalle entre deux réponses consécutives est toujours d’au moins .
La mesure DME
Il découle des descriptions ci-dessus le graphe suivant :

Après avoir émis une interrogation l’interrogateur écoute les réponses pendant  (la portée maxi. du DME est de 200 NM ou 370 km).
(la portée maxi. du DME est de 200 NM ou 370 km).
Pendant cette durée, l’interrogateur analyse toutes les impulsions reçues (réponses), celles qui lui sont destinées ainsi que les réponses adressées à d’autres aéronefs. Il est en mode recherche.
Comme chaque interrogateur émet vers la balise DME (transpondeur) avec une récurrence aléatoire qui lui est propre, seules les réponses destinées à « notre » interrogateur seront fixes par rapport à l’instant de ses émissions.
Après 6 impulsions cohérentes, l’interrogateur passe en mode poursuite afin de diminuer l’encombrement du spectre dans la bande de fréquences, la fenêtre d’analyse temporelle est réduite autour du temps de réponse pour les impulsions cohérentes.
Le décalage des impulsions de réponse dû à la vitesse de rapprochement (ou d’éloignement) est négligeable vis à vis de la capacité d’analyse de l’interrogateur. Lorsque les premières impulsions de réponses viennent à manquer (déplacement de l’avion), la fenêtre d’analyse temporelle est décalée.
On constate que pour une récurrence de 150 Hz, un avion à Mach 2, en vitesse radiale, ne parcourt que 4,50 m environ : la variation des impulsions de réponses est négligeable.
Dans la figure ci-dessus :
 : instant de l’émission initiale de l’interrogateur (pour notre exemple) .
: instant de l’émission initiale de l’interrogateur (pour notre exemple) . : instants des émissions de l’interrogateur à rythme aléatoire.
: instants des émissions de l’interrogateur à rythme aléatoire.
Pour rechercher une corrélation des réponses, le récepteur utilise une fenêtre temporelle d’analyse. En balayant les elle permet de discriminer les impulsions des réponses du transpondeur, seules cohérentes avec l’instant d’émission des interrogations.
Les réponses destinées aux autres interrogateurs (ceux des autres avions) ne sont pas cohérentes avec l’émission de l’interrogation, chaque interrogateur émettant avec un rythme qui lui est propre et aléatoire. L’interrogateur est en mode recherche.
Une fois la fenêtre d’analyse temporelle verrouillée sur les impulsions de réponses cohérentes, celle-ci réduit sa largeur. On est alors en mode poursuite, la cadence des interrogations diminue.
Lorsque la distance avion – balise change (déplacement de l’aéronef), la fenêtre d’analyse se décale pour se verrouiller sur les réponses cohérentes.
En cas de réplique de l’interrogateur à quelques impulsions destinées à un autre aéronef, le temps de récupération de l’interrogateur est de l’ordre de  .
.
Dès réception de 50% de réponses validées par le récepteur, ce dernier est en mesure de calculer (et afficher) la distance aéronef – balise. La distance est affichée en mille nautiques (NM). Par déduction des mesures de distance, le récepteur DME est aussi capable d’indiquer la vitesse de rapprochement (vitesse radiale) par rapport à la balise.
Les impulsions de squitter
Pour garantir un fonctionnement de l’émetteur à charge constante, le transpondeur ajoute des « impulsions de squitter » aléatoires. Ce minimum est nécessaire pour faciliter l’ajustement du CAG du récepteur des interrogateurs avec le signal d’une station au sol.
En outre, les paramètres les plus importants du transpondeur sont continuellement surveillés et ajustés lorsque le système est opérationnel. Cette boucle de surveillance et de régulation ne fonctionne correctement que si le nombre d’impulsions de test est suffisant.
Les impulsions de squitter aléatoires sont générées par un circuit interne et transmises à l’émetteur. Là, ces impulsions sont ensuite traitées exactement de la même manière que les impulsions de réponses destinées aux aéronefs.
La précision du DME
- De 0 à 65 NM la précision est de
 0,12 NM + 0,05 % de la distance.
0,12 NM + 0,05 % de la distance. - Au-delà de 65 NM la précision est de 0,17 NM + 0,05 % de la distance.

L’identification de la balise DME
Pour permettre l’identification de chaque balise DME (transpondeur), cette dernière cesse l’émission des réponses et des impulsions de squitter, puis émet en code Morse son indicatif (qui lui est propre). Le code est composé de 3 lettres, il est émis un seule fois toutes les 30 secondes. La fréquence BF est alors de 1350 Hz.
- La durée des points est de 100 ms.
- La duré des traits est de 300 ms.
- Les traits et espaces sont séparés par un silence de 100 ms.
- Les caractères sont espacés par un silence de 300 ms.
Le signal audio reçu par le récepteur de l’interrogateur est envoyé sur le système d’intercommunications de bord où l’opérateur peut choisir de l’écouter pour lever de doute.
Synoptique de principe d’un interrogateur DME
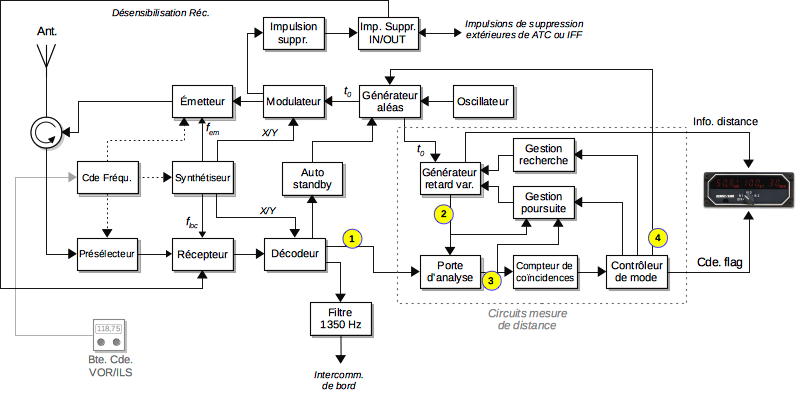
L’émetteur
Un générateur d’aléa fournit les paires d’impulsions d’interrogation à un étage modulateur. La cadence des impulsions d’interrogation est commandée par le signal Recherche / Poursuite issu du contrôleur de mode (4).
Pour éviter d’émettre des impulsions d’interrogation en mode recherche et lorsque le récepteur ne reçoit pas les signaux d’une balise (interrogateur hors de portée), l’étage auto stand-by bloque le générateur d’aléas. Dans ce cas l’émetteur est en veille.
Comme la balise (le transpondeur) émet des réponses (à tous les interrogateurs), éventuellement complétées par des impulsions de squitter, la réception de ces paires impulsions au dessus d’un seuil (généralement 400 paires / s) provoque le basculement de l’étage auto stand-by qui autorise alors la génération des paires d’impulsions d’interrogation à un rythme aléatoire. L’interrogateur est alors en mode recherche.
Un synthétiseur de fréquence délivre le signal maître oscillateur pour l’étage d’émission (fem). il est piloté par un circuit commande de fréquences lequel reçoit ses ordres :
- soit par une boîte de commande spécifique,
- soit par la boîte de commande du VOR/ILS.
Le synthétiseur fournit également une référence temporelle au modulateur de l’émetteur ainsi qu’au décodeur du récepteur suivant le mode utilisé X ou Y.
Le modulateur pilote deux étages :
- L’émetteur, piloté par le modulateur, émet les paires d’impulsions d’interrogation. L’émission est assurée par une antenne omnidirectionnelle après passage dans un circulateur.
- Il commande un étage de désensibilisation du récepteur durant l’émission des paires d’impulsions
 afin d’empêcher l’entrée d’impulsions indésirables dans le récepteur.
afin d’empêcher l’entrée d’impulsions indésirables dans le récepteur.
Cet étage fournit un signal nommé « SUP OUT » pour désensibiliser les récepteurs des équipements travaillant des la même bande de fréquences (ATC, IFF, TACAN, etc.) à bord de l’aéronef.
En retour, cet étage peut également recevoir des mêmes équipements un signal nommé « SUP IN » déclenchant la désensibilisation du récepteur de l’interrogateur pendant la durée de cette impulsion.
Le récepteur
En plus de délivrer la fréquence maître oscillateur de l’émetteur, le synthétiseur délivre la fréquence locale (floc) nécessaire à la réception des réponses de la balise (transporteur) DME. La fréquence locale sera décalée de 63 MHZ + la valeur de la F.I. choisie par le constructeur.
Les impulsions de réponses reçues par l’antenne (celles destinées à l’aéronef ainsi que tous les autres interrogateurs) sont dirigées vers le mélangeur (récepteur superhétérodyne) à travers un circulateur et un filtre présélecteur, lequel supprime les signaux issus de l’émetteur.
Le mélangeur réalise la transposition du spectre reçu vers la plage d’amplification de la F.I.
Un étage décodeur fait suite à l’amplificateur F.I. Il assure plusieurs fonctions :
- Fournir une impulsion de sortie pour chaque paire d’impulsions reçues et correctement espacées (toutes les réponses et les impulsions de squitter)(1).
- Détecter les signaux BF d’identification (1350 Hz) et les diriger vers le système d’intercommunication de bord.
- Piloter l’étage auto stand-by.
Les impulsions de sortie du démodulateur sont appliquées à un étage effectuant l’analyse temporelle des réponses à l’aide d’une porte se décalant dans le temps. Le décalage temporel est piloté par un générateur à retard variable (2), lui-même synchronisé sur le générateur d’aléas.
Un compteur totalise les réponses cohérentes et au dessus d’un pourcentage significatif il envoie un signal de commande au contrôleur de mode qui passe de recherche en poursuite :
- Le générateur de retard variable est stoppé sur sa valeur, celle-ci est proportionnelle à la distance balise – aéronef, elle est transmise au dispositif d’affichage (panneau avant du DME, HSI, autre).
- La durée de la fenêtre d’analyse temporelle est réduite pour s’ajuster sur celle de l’impulsion de réponse du démodulateur,
- Tout déplacement de l’impulsion de réponse issue du démodulateur (aéronef en éloignement ou rapprochement) donne lieu à un décalage du générateur de retard variable pour assurer la poursuite de la réponse cohérente.
- Le générateur d’aléas change de cadence.
Lorsque le taux de réponses cohérentes diminue, le contrôleur de mode bascule de poursuite en recherche.
Synoptique de principe d’un transpondeur
![]()
Rappel : dans le système DME, on appelle transpondeurs les balise sol du DME
Le récepteur
Les impulsions d’interrogation (celles de tous les aéronefs ainsi que les impulsions parasites) sont dirigées vers un récepteur superhétérodyne via un circulateur.
Le récepteur possède un étage d’amplification de la fréquence intermédiaire accordé sur 63 MHz. Cet artifice permet de n’avoir qu’un seul oscillateur local pour la chaîne émission et réception.
Le signal démodulé est appliqué à un décodeur qui élimine toute impulsion ou paire d’impulsion ne répondant pas aux spécifications DME (durée et espacement). Pour ce faire, l’information mode X/Y est fournie au décodeur; elle est déterminée par le mode choisi lors de la mise en oeuvre de la balise.
Les interrogations conformes aux recommandations DME sont ensuite retardées de  (délai de réponse des transpondeurs) et appliquées à un étage codeur.
(délai de réponse des transpondeurs) et appliquées à un étage codeur.
L’émetteur
Le codeur délivre une paire d’impulsions de réponse espacées de  (Mode X), ou
(Mode X), ou  (Mode Y), lesquelles sont ensuite appliquées à l’étage modulateur de la chaîne émission de la balise.
(Mode Y), lesquelles sont ensuite appliquées à l’étage modulateur de la chaîne émission de la balise.
L’émetteur, piloté par le synthétiseur, fournit un signal SHF, modulé en amplitude par les deux impulsions de réponse. La réponse est rayonnée par une antenne à polarisation verticale.
La fréquence d’émission est programmée selon le canal choisi lors de la mise en oeuvre de la balise.
Le circulateur permet d’isoler l’entrée du récepteur des signaux forts de l’émetteur.
Toutes les 30 s le codeur interrompt ses réponses pour générer le signal d’identification audio (1350 Hz) de la balise en code Morse.
Les impulsions de squitter
Le décodeur alimente un étage compteur (1) en fonction du nombre d’interrogations reçues (tous aéronefs).
Un générateur d’impulsions de squitter fournit au décodeur (3) le nombre d’impulsions nécessaires pour atteindre, en permanence et en complément des impulsions de réponses aux aéronefs, une cadence d’émission de 2700 à 3000 impulsions (2). Cette émission est spontanée et aléatoire.
Ainsi l’émetteur de la balise travaille donc à charge constante quel que soit le nombre d’aéronefs l’interrogeant.
Lorsque la cadence des réponses dépasse 2700 – 3000 impulsions, le compteur 2700-3000 commence à bloquer un certain nombre d’impulsions de squitter afin de ne pas surcharger l’émetteur tout en essayant de répondre au maximums d’interrogations (4).
La commande automatique de surcharge (CAS)
La capacité maximum de réponse d’un transpondeur est de 100 aéronefs. Au cas, improbable, où le récepteur recevrai plus de 100 interrogations différentes, le gain variable du récepteur est alors ajusté automatiquement pour ne prendre en compte que les interrogations les plus fortes (aéronefs les plus près de la balise) afin de ne pas dépasser le seuil de 2700 – 3000 réponses / s.
Le monitoring et la redondance
Afin d’assurer la continuité de service, les transpondeurs (balises au sol) comportent 2 chaînes, une active et l’autre en veille.
Un dispositif de monitoring prélève les signaux essentiels de chaque chaîne, assure une contre-réaction sur les étages de la chaîne active.
En cas de défaillance de la chaîne active, la chaîne en veille prends le relais et une alarme signale l’avarie au service chargé de la supervision.
Bibliographie :
- OACI – Annexe 10.
- IVAO TM France.
- Le DME par Badrig SERABIAN.
- GROUND BEACON DME 415/435 – THALES.
- Current developements in signal modeling of the precision DME – Michael S. Braash
- Aircraft Radio Systems – J. Powell
- Les moyens de radionavigation – Ecole Militaire de l’Air – CDT Lecocq.