
L’atterrissage tout temps ou l’I.L.S.
Document rédigé en juin 2017, complété en 2023.
Atterrir par n’importe quel temps, et surtout par mauvaise visibilité, a toujours été une des difficultés du pilotage. Il est évident que les homo aéronoticus ont très tôt cherché un moyen pour s’affranchir au mieux de cette importante difficulté.
Pour réaliser cette fonction l’I.L.S. (Instrument Landing System) a été inventé.
Les premiers tests du système tel qu’il fallait le définir ont commencé en 1929 aux Etats Unis.
Sa mise en service fut autorisée par la CAA en 1941. 6 sites en étaient équipés.
Le 26 janvier 1938, le premier vol commercial utilise un ILS pour atterrir.
En 1945, 9 sites étaient en service et 10 autres sites étaient en cours d’équipement.
En mars 1964 le premier atterrissage en « tout automatique » a lieu à Bedford en Angleterre.
Séquence d’atterrissage avec les informations de l’ILS affichées sur le HUD.
Les constituants du système
Le système comporte deux segments :
- Le segment sol, installé sur les pistes de l’aérodrome, il se sub-divise en 3 sous-ensembles :
- Le localizer, qui indique au pilote son écart par rapport à l’axe de la piste, familièrement appelé LOC.
- Le Glide-Path, qui indique au pilote son écart par rapport au plan de descente, familièrement appelé Glide.
- Les Markers, qui indiquent au pilote sa distance par rapport à l’entrée de piste.
- Le segment bord, installé à bord d’un aéronef. Il comprend généralement :
- Le récepteur ILS, généralement il est combiné avec le récepteur VOR.
- L’indicateur OBI, basculé en mode ILS (automatiquement)
- Quelquefois une boîte de commande pour commander le récepteur.
- Un récepteur Marker (MKR).
Le principe consiste à émettre deux lobes VHF de part et d’autre de l’axe de piste, et deux autres lobes UHF de part et d’autre du plan de descente aboutissant à l’entrée de piste.

En plus de ces quatre faisceaux 3 autres lobes VHF (75 MHz) sont émis verticalement afin de matérialiser les distances séparant l’aéronef de l’entrée de piste.
Le segment sol
Situés aux abords de l’entrée de piste, les émetteurs LOC et Glide nécessitent une maîtrise rigoureuse des faisceaux radioélectriques émis afin d’assurer un guidage des aéronefs le plus rectiligne possible.
Le LOC, comme le Glide, émettent en VHF et UHF et à ces fréquences les réflexions sur les obstacles divers peuvent provoquer des altérations sur les lobes rayonnés par les antennes. Le développement de l’I.L.S. a donc nécessité l’utilisation de techniques radioélectriques particulières pour réduire ces effets indésirables au minimum.
Le Localizer (LOC)
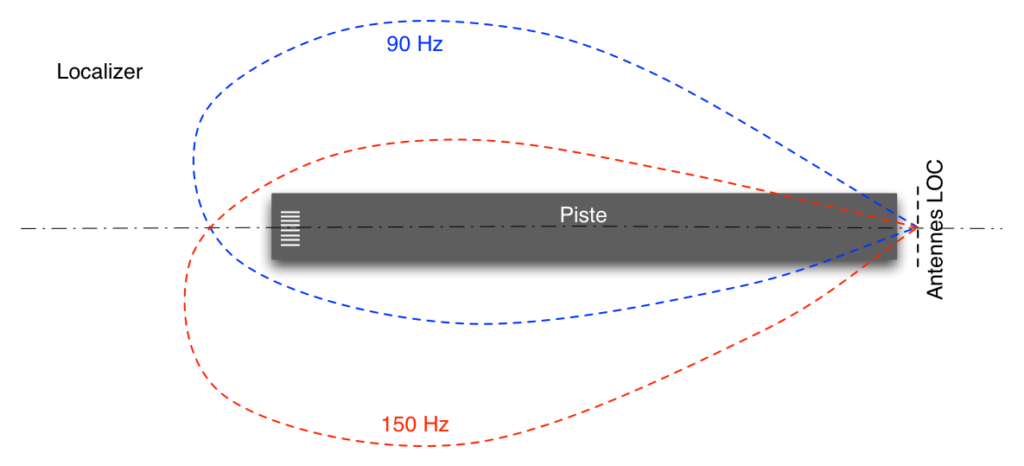
Le localizer émet deux faisceaux de part et d’autre le l’axe de piste. L’un est modulé en amplitude à 150 Hz (celui de droite), l’autre à 90 Hz (celui de gauche). Ces deux faisceaux se recoupent à égalité de champ dans l’axe exact de la piste.
Par comparaison entre le 90 Hz et le 150 Hz reçus, le récepteur LOC est capable d’indiquer au pilote sa position par rapport à l’axe de la piste via un indicateur. En complément l’émetteur LOC transmet toutes les 30″ son indicatif morse avec une tonalité BF de 1020 Hz.
La manière la plus simple de concevoir un émetteur Localizer consiste à émettre sur 2 antennes proches et placées symétriquement par rapport à l’axe de piste, 2 porteuses synchrones et verrouillées en phase, modulée l’une à 90 Hz, l’autre à 150 Hz.
- La fréquence porteuse VHF est comprise entre 108 et 117,975 MHz comme le VOR, mais ici ce sont les canaux impairs (première décimale impaire) qui sont affectés au LOC.
- Les niveaux relatifs et les taux de modulation sont maintenus constants.
Ce système ILS, nommé « Radioalignement de piste équi-signal », présente quelques inconvénients dus principalement à la nécessité de maintenir une grande stabilité relative des deux émissions et de leurs modulations.
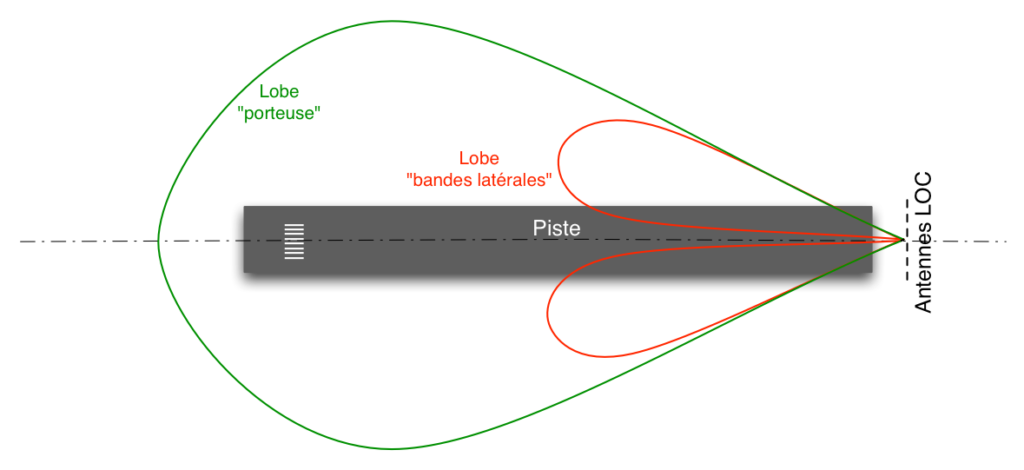
Pour obtenir un meilleur résultat, le principe suivant est utilisé : 2 diagrammes sont rayonnés, non pas par l’égalité de deux champs, mais par l’annulation d’un diagramme par l’autre, annulation qui présente l’avantage d’une meilleure stabilité.
Pour obtenir ce résultat, 2 émetteurs rayonnent selon les diagrammes suivants :
- Un premier diagramme « porteuse » rayonne en émission modulée à taux égal à 90 et 150 Hz (CSB).
- Un second diagramme « bandes latérales » :
- rayonne les mêmes bandes latérales que le premier diagramme mais sans porteuse (SBO),
- avec une phase inversée sur un des signaux de modulation,
- le diagramme est de type impair, c’est à dire qu’il présente un champ rayonné nul dans l’axe de piste et une opposition de phase VHF entre les deux lobes émis.
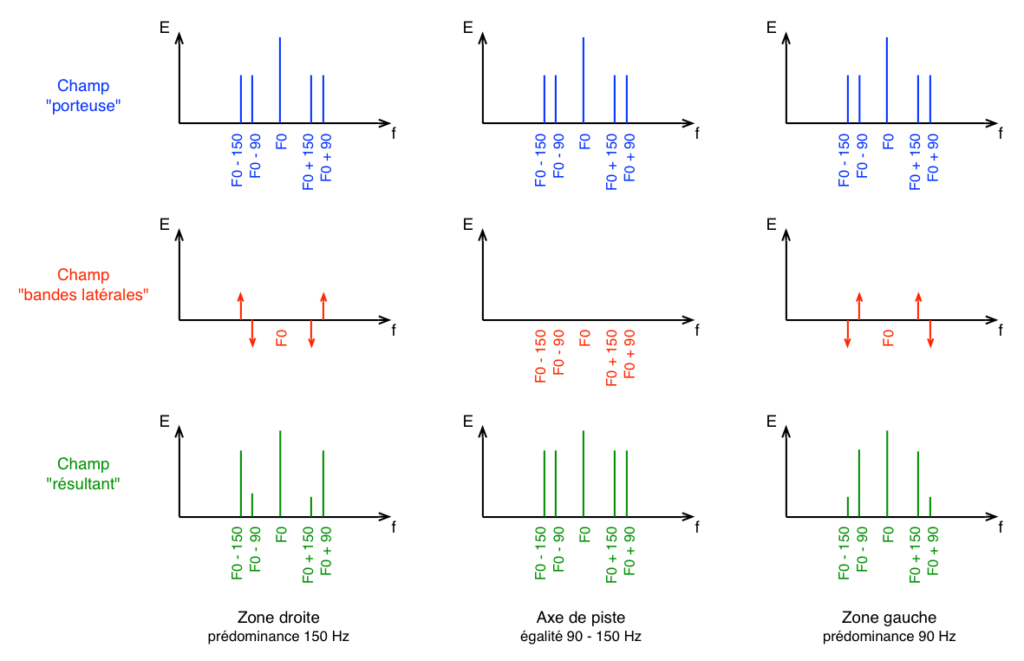
La figure ci-dessous représente schématiquement les champs reçus suivant la position du récepteur LOC.
Les faisceaux sont ouverts d’environ ± 35° dans le plan horizontal et environ + 7° dans le plan vertical jusqu’à 17 NM; et ± 10° dans le plan horizontal jusqu’à 25 NM.
Les taux de modulation sont de 40% en AM (pour le 90 et le 150 Hz).
Un radioalignement de piste conçu selon ce système donne des résultats satisfaisants sur un aérodrome dégagé, pour lequel les rayonnements réfléchis par les obstacles divers sont reçus avec une f.e.m. très faible par rapport au rayonnement direct. Hélas ce cas est assez rare et un compromis doit être fait entre rectitude de l’axe de descente (fonction des réflexions parasites) et la couverture en azimuts imposée par l’OACI (ci-dessus). En plus, la couverture en azimuth est souvent étendue à ± 60° (demande de l’OACI) arrose encore plus d’obstacles perturbateurs, créant ainsi encore plus de réflexions parasites.
Pour améliorer les performance du localizer le secteur de rayonnement a été scindé en deux :
- le secteur d’approche (± 10° de l’axe d’approche et jq. 25 NM) est défini par le rayonnement directif.
- le secteur de couverture (± 35°, ou plus…, de l’axe d’approche et jq. 17 NM) est défini par le rayonnement de couverture (ou clearance).
Suivant l’importance des réflexions parasites, le rayonnement de couverture (clearance) est émis :
- soit sur la même fréquence et par les même sources que le rayonnement directif, on est dans le cas d’un localizer monofréquence,
- soit sur une fréquence légèrement décalée et par un réseau d’aériens indépendants, on est dans le cas d’un localizer bi-fréquence.
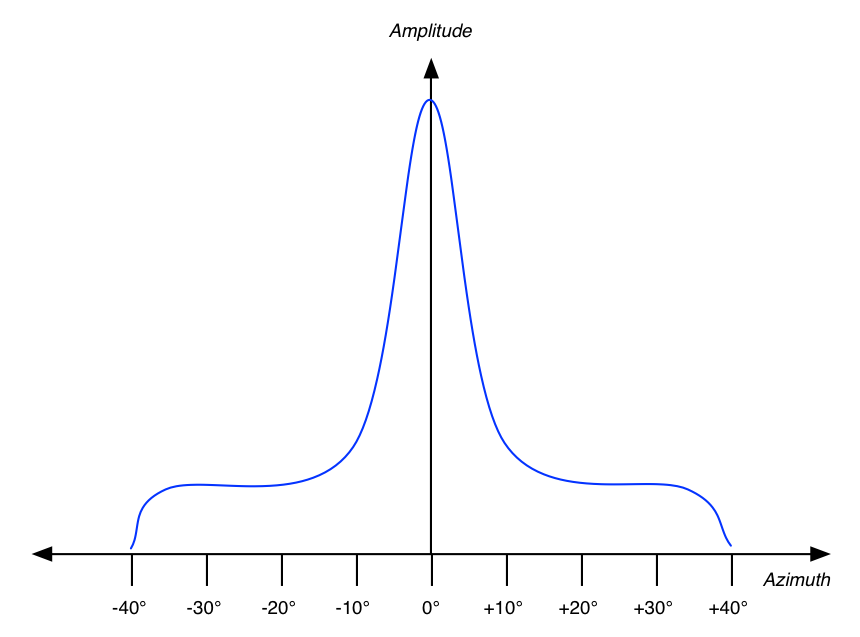
Dans la figure ci-dessus, le rapport des champs émis dans l’axe et dans la zone de couverture est d’environ 10 à 12 dB, les réflexions sont donc minimisées dans l’axe.
Lorsque l’importance des rayonnements réfléchis par les obstacles est trop élevé, le diagramme de rayonnement utilisé est celui de la figure ci-dessous.
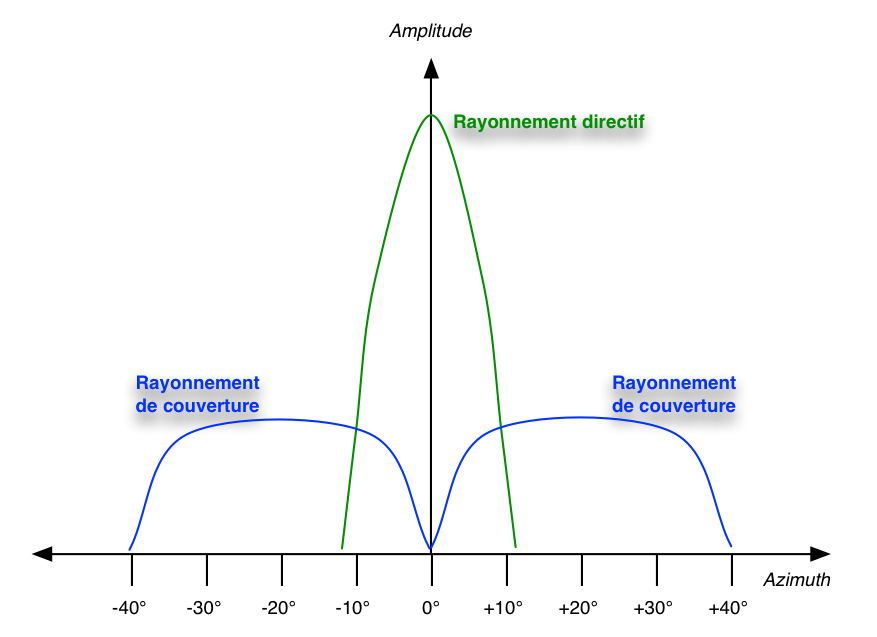
L’ensemble directif rayonne un pinceau étroit dans la direction de l’approche. Le diagramme de rayonnement est optimisé pour obtenir un niveau de lobes secondaires très bas, assurant ainsi un bon niveau de protection contre les réflexions parasites.
L’ensemble des lobes de couverture permet de masquer les lobes secondaires du lobe directif et assure une couverture satisfaisante.
Pour éviter les franges d’interférences (deux émissions sur la même fréquence), la fréquence démission du lobe de couverture et celle du lobe principal sont légèrement décalées (9,5 kHz).
Ce décalage, faible par rapport à la bande passante des récepteurs, permettent à ces derniers, de recevoir indifféremment l’une et l’autre émission sans les différencier. Il est suffisant pour que les champs reçus le long de l’axe de piste s’additionnent… quadratiquement. Les champs parasites sont dès lors très vite étouffés par le champ principal (effet de capture).
Une grande rectitude de l’axe de descente est ainsi atteinte.
Pratiquement l’ensemble directif est de type « null-reference » et l’ensemble de couverture de type « equi-signal ».
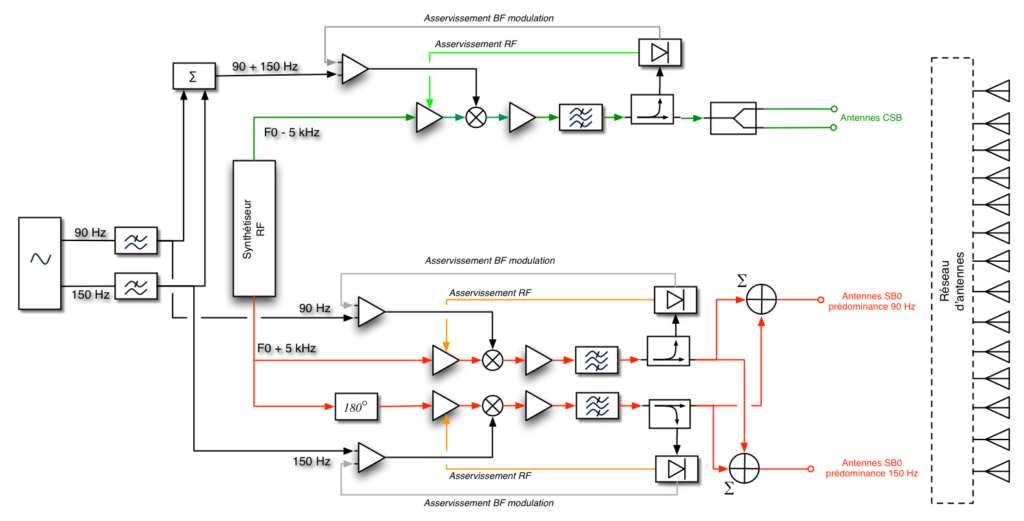
Synoptique d’un émetteur Localizer
La génération des signaux BF
Un ensemble d’oscillateurs BF fournissent les deux signaux 90 et 150 Hz.
Afin d’assurer une stricte relation de phase entre les deux BF, les deux oscillateurs sont corrigés en phase et en amplitude.
Pour éliminer au maximum les composantes indésirables, les signaux sont respectivement injectés dans un filtre passe-bas.
Le 90 Hz et le 150 Hz sont additionnés pour servir de signal de modulation à la chaine émission CSB. Ils sont également appliqués séparément aux deux chaines d’émission SBO.
La génération des signaux RF
Un synthétiseur élabore les deux porteuses décalées chacune de  4,75 kHz par rapport à la fréquence théorique du canal LOC.
4,75 kHz par rapport à la fréquence théorique du canal LOC.
Pour la chaîne SBO, le signal RF est appliqué à l’émetteur modulé par le 90 Hz avec un déphasage de 0°; il est appliqué à l’émetteur modulé par le 150 Hz avec un déphasage de 180°.
Les deux porteuses de la chaîne SBO sont donc en opposition de phase.
La chaîne émission CSB
Le signal RF issue du synthétiseur (F0 – 4,75 kHz) est injecté dans un amplificateur différentiel, lequel reçoit les informations nécessaires à la correction de phase et d’amplitude (principe détaillé plus bas).
Un étage modulateur assure la modulation du signal RF à partir des deux BF (90 & 150 Hz) sommées et corrigées en amplitude et phase (principe détaillé plus bas).
Un amplificateur de puissance fournit les 50 W nécessaires au rayonnement du signal. Il est suivi d’un filtre passe-bande assurant la réjection des composantes indésirables.
Les asservissements de phase, d’amplitude et de modulation
La sortie de la chaîne émission traverse un coupleur directif, lequel prélève une petite partie du signal RF qui est ensuite démodulé.
Les informations ainsi obtenues sont exploitées pour corriger :
- L’amplitude et la phase du signal RF par rétroaction sur l’amplificateur à gain variable à l’entrée de la chaîne RF.
- L’amplitude et la phase du signal modulant (90 & 150 Hz) également par rétroaction sur l’amplificateur à gain variable à l’entrée du modulateur.
Ces asservissements sont la garantie de signaux stables en phase et en amplitude, gages de l’exactitude de l’axe de descente Localizer.
Après le coupleur directif, un autre coupleur assure la répartition de l’émission CSB vers les aériens du réseau d’antennes LOC.
La chaîne d’émission SBO
Elle se compose de deux émetteurs sensiblement identiques à celui de la chaîne Em. SBC :
- La fréquence fournie par le synthétiseur est décalée de + 4,75 kHz par rapport à la fréquence théorique du canal.
- Un émetteur est modulé par le signal BF à 90 Hz. Sa phase RF n’est pas modifiée.
- L’autre émetteur est modulé par le 150 Hz. Sa phase RF est inversée (180°).
Couplage des émetteurs SBO
Faisant suite au coupleur directif de chaque émetteur, un réseau de coupleurs hybrides effectue les sommes respectives des deux signaux RF modulés.
On obtient donc les spectres suivants :
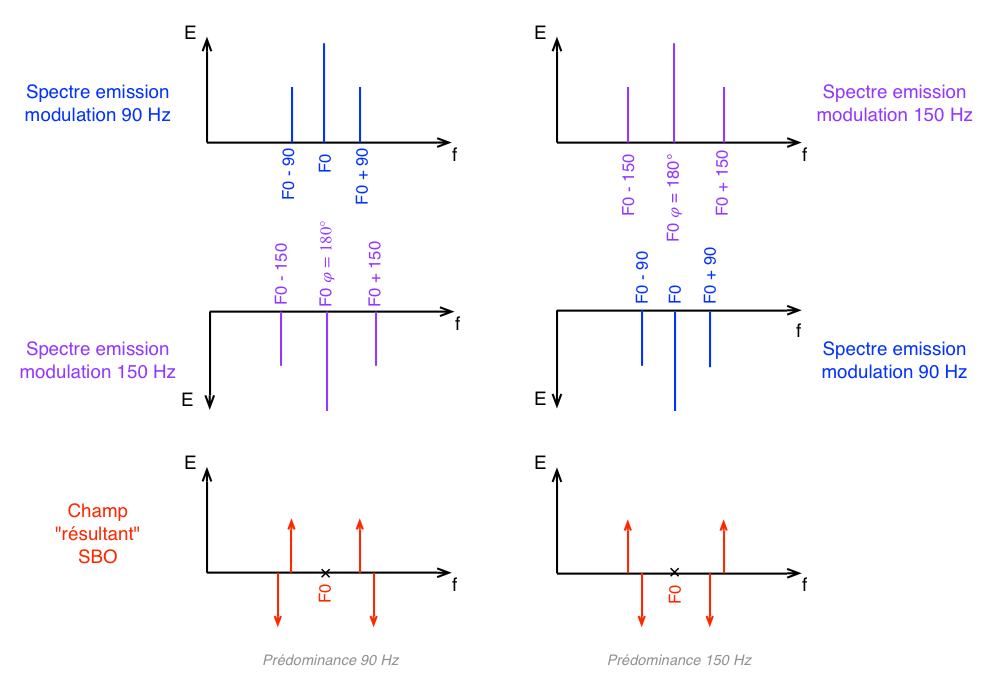
On a ainsi synthétisé les spectres SBO nécessaires aux Localizers « null-reference ».
Le segment bord
Pour recevoir et exploiter les informations décrites ci-dessus, les récepteurs ILS comportent en réalité 3 récepteurs :
- 1 récepteur Localizer,
- 1 récepteur Glide,
- 1 récepteur Marker (parfois séparé du récepteur LOC-Glide).
Synoptique d’un récepteur LOC.
Par comparaison avec le principe de l’émetteur LOC, celui du récepteur semble d’une simplicité désarmante.
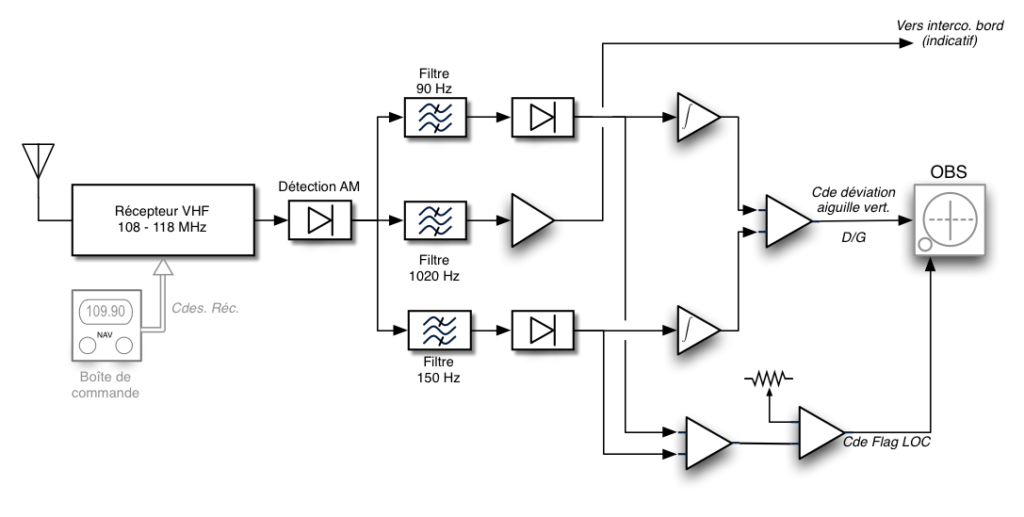
Un récepteur superhétérodyne (le même que celui utilisé pour le V.O.R.) reçois les signaux du Localizer.
Suivant sa position il reçoit une modulation comportant les deux fréquences BF 90 et 150 Hz. Leur amplitude relative dépend de l’angle  entre l’axe de piste et la position de l’aéronef.
entre l’axe de piste et la position de l’aéronef.
Les canaux attribués aux émetteurs LOC sont impairs dans la bande de fréquence 108,10 – 111,95 MHz, ils sont au nombre de 40. En sélectionnant un de ces canaux le récepteur bascule du mode VOR (s’il était accordé dans ce mode précédemment) en mode ILS/LOC.

L’étage de détection démodule les signaux BF reçus. Les signaux démodulés sont injectés dans 3 filtres passe bande :
- un filtre centré sur 1020 Hz, fréquence BF de l’indicatif morse émis par les émetteurs LOC. La BF est ensuite amplifiée et transmise au système d’intercommunication de bord lequel permet au pilote d’entendre l’indicatif en morse pour être sûr qu’il reçois la bonne balise.
- un filtre centré sur 90 Hz,
- un filtre centré sur 150 Hz,
Ces deux derniers filtres, après avoir extrait leur fréquence de résonance, injectent leur signaux dans des détecteurs BF. En sortie de ces derniers des étages intégrateurs délivrent une tension continue proportionnelle au taux de modulation reçu pour leur fréquence filtrée.
Les deux valeurs continues sont injectées aux entrée d’un amplificateur différentiel, sa sortie pilote l’aiguille verticale de l’OBI (celle là même qui servait à la navigation VOR en manuel).
Par définition le taux de modulation 90 Hz + le taux de modulation 150 Hz reçus est constant. En additionnant les deux composantes continues dans un sommateur on doit avoir une valeur également constante si la réception des signaux est correcte. Dans le cas contraire un comparateur fait apparaître le Flag LOC.
Le Glide-Path
Le Glide émet deux faisceaux, l’un en dessus et l’autre en dessous de l’axe idéal de descente. L’un est modulé en amplitude à 90 Hz (celui du haut ), l’autre à 150 Hz (celui du bas ). Ces deux faisceaux se recoupent a égalité de champ sur l’axe idéal de descente, généralement incliné à 3° de l’horizontale (sauf aérodromes particuliers).
Tout comme pour le LOC, par comparaison entre le 90 Hz et le 150 Hz reçus, le récepteur Glide est capable d’indiquer au pilote sa position par rapport à l’axe de descente via un indicateur, l’OBI toujours lui.
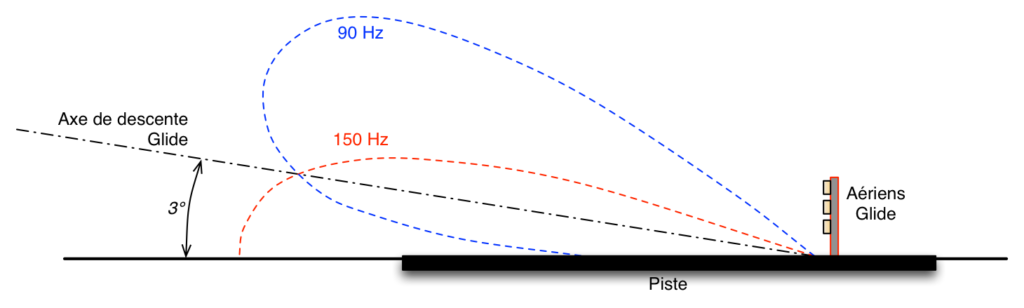
Bien entendu, les antennes de la balise Glide ne sont pas au milieu de la piste mais sur le côté. Les lobes sont déportés par un artifice électronique.
- La fréquence UHF est comprise entre 329,15 et 335 MHz, répartie en 40 canaux, elle est appairée à la fréquence du LOC (Cf.: FAA – 6750.54). En exploitation, le pilote sélectionne la fréquence du LOC, le Glide est automatiquement accordé sur la bonne fréquence. Cette opération est transparente pour le pilote.
- Les faisceaux sont ouverts d’environ 16° dans le plan horizontal et 0,7° dans le plan vertical.
- La puissance de l’émetteur est d’environ 30 W.

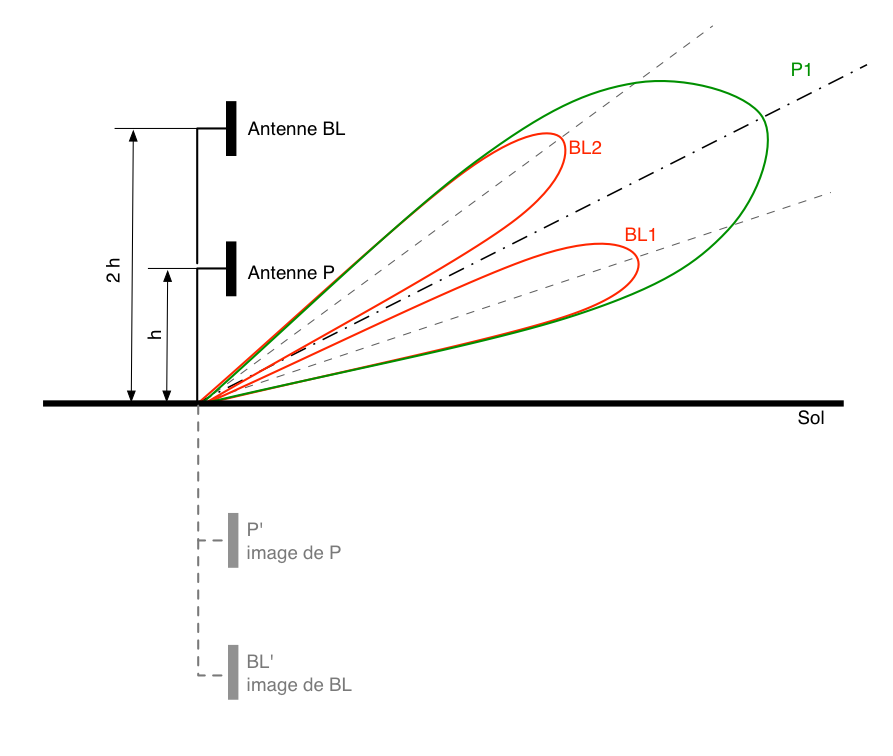
Contrairement au radioalignement de piste dont le rayonnement en azimuts est formé par un réseau d’antennes, le radioalignement de descente utilise des lobes d’interférence produits par une source rayonnante et son image réfléchie par le sol.
Les lobes d’interférence sont d’autant plus nombreux et serrés que la hauteur de l’antenne (exprimée en longueurs d’onde) est grande.
L’élévation des nuls et maxi. de rayonnement est donnée pour des angles tels que :

- n = 0, 2, 4 … pour les nuls,
- n = 1, 3, 5 … pour les maximums.
Avec :
 = longueur d’onde de l’émission.
= longueur d’onde de l’émission.
h = hauteur de l’antenne au dessus du sol.
Le radioalignement de descente du type « nulle-reference » rayonne à partir de deux antennes placées sur le même mât.
La plus basse rayonne la porteuse modulée (CSB),
L’autre les bandes latérales (SBO).
Les diagrammes des taux de modulation se déduisent de la même manière que pour le radioalignement de piste (LOC).
La formation d’un axe de descente rectiligne suppose que le sol entre les antennes et l’aéronef soient parfaitement plan. Dans certains cas cette condition n’est pas remplie et l’axe ondule plus ou moins au gré des obstacles réfléchissants. Pour réduire ce risque, un réseau à 3 antennes est utilisé.
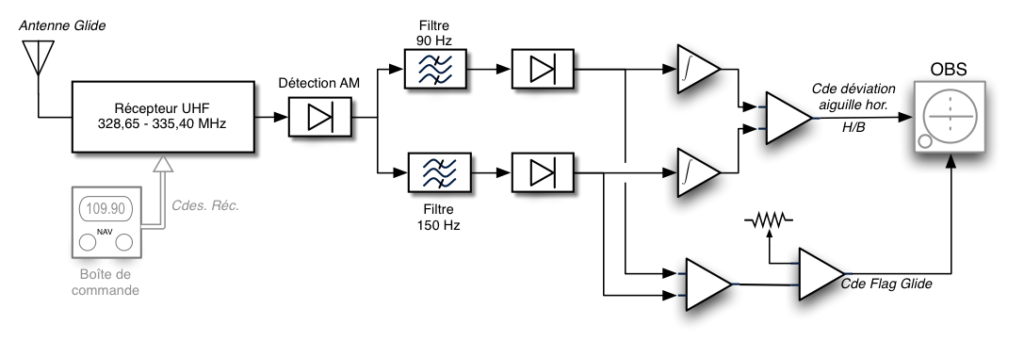
Synoptique d’un récepteur Glide-path
Le principe reste le même étant donné les caractéristiques des lobes émis par le Glide.
Etant donné que son utilisation est simultanée avec celle du Localizer, le récepteur Glide est toujours incorporé au récepteur ILS.
Comme expliqué plus-haut, les fréquences Glide sont appairées avec les fréquences LOC. Lorsqu’une fréquence LOC est affichée sur la boîte de commande (ou le panneau de commande du récepteur VOR-LOC-Glide) les informations transmises au récepteur Glide lui indiquent la fréquence (UHF) sur laquelle il doit s’accorder. Aucune fréquence Glide n’est affichée sur la boîte de commande ou le panneau de commande.
La gamme de fréquences s’tend de 329,15 à 335,00 MHz, elle comprend 40 canaux appariés avec ceux du LOC.
Le reste de la chaîne réception, démodulation, traitement de l’information est identique à celle du récepteur LOC, mais en plus simple, l’étage filtrage, amplification BF du 1020 Hz a disparu : seule la chaîne réception LOC est utilisée pour fournir l’indicatif de l’installation ILS.
L’information extraite des différences de modulation (DDM) est proportionnelle à l’écart entre le plan de descente idéal vers la piste et la position de l’aéronef : ce n’est plus l’aiguille D/G de l’OBI qui affiche cet écart mais une aiguille verticale. Un dispositif s’assure que la somme des niveaux de modulation est constante, et dans le cas contraire commande l’apparition d’un Flag Glide.
Tout comme lors du fonctionnement LOC, lorsque l’ILS n’est pas utilisé (Dans le cas d’une utilisation du VOR), l’aiguille verticale de l’OBI est déviée en dehors de la zone d’affichage de l’indicateur. On dit qu’elle est « effacée ». Dans ce cas le Flag Glide est lui aussi « effacé » pour ne pas surcharger d’informations le pilote.
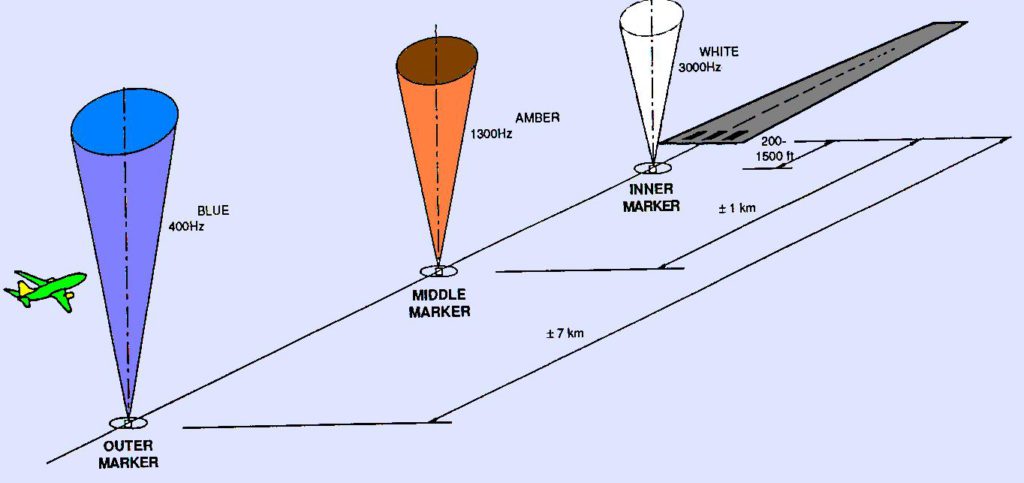
Les balises Marker
Afin d’indiquer au pilote la distance restant avant le toucher de roues, une série de 3 balises sont implantées dans l’axe de la piste à des intervalles normalisés :
- 7-8 km du seuil de piste, c’est outer marker.
- 1 km du seuil de piste, c’est le middle marker.
- 100 m du seuil de piste, c’est l’inner marker.

Les 3 balises émettent sur la fréquence fixe de 75 MHz.
Leur lobe de rayonnement a la forme d’un cône vertical (posé sur sa pointe).
La puissance rayonnée est d’environ 3 à 5 Watts (ajustable selon les terrains).
Le taux de modulation est de 95%.
Chaque balise marker émet une modulation particulière :
- l’outer marker (OM) – 400 Hz, pulsée à la cadence de 2 traits par seconde.
- le middle marker (MM) : 1300 Hz, pulsée à la cadence de 1 point et 1 trait par seconde.
- l’inner marker (IM) : 3000 Hz, pulsée à la cadence de 6 points par seconde.
En même temps que ces modulations, des lampes de couleurs différentes sont allumées sur la planche de bord au rythme des modulations :
- Une lampe bleue pour l’outer marker.
- Une lampe ambre pour le middle marker.
- Une lampe blanche pour l’inner marker.
Vous pouvez entendre et voir ce comportement sur ce lien.
En plus d’une indication de distance, la durée de traversée du cône d’émission (audible pour les tonalités BF) donne au pilote une indication approximative de sa hauteur par rapport au sol. Cela lui permet de vérifier la cohérence avec l’information Glide.
Synoptique d’un récepteur Marker
Parfois les récepteurs markers sont construits d’un seul bloc (récepteur et indicateur dans la même unité), parfois en deux unités séparées, le récepteur et l’indicateur.
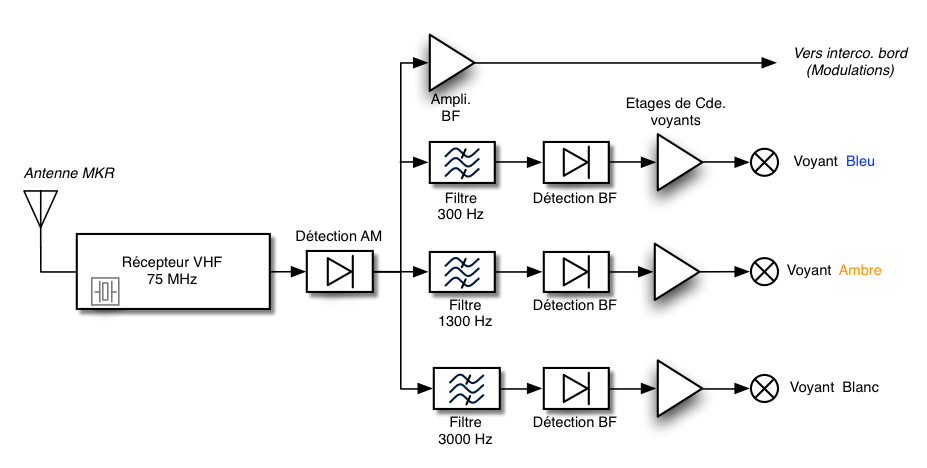
Le récepteur est du type superhétérodyne, piloté par quartz (75 kHz).
La détection AM injecte ses signaux dans :
- un amplificateur BF. Il délivre un signal BF correspondant aux diverses tonalités reçues lors de la traversée des lobes de rayonnement des balises. Ce signal BF est ensuite utilisé par le sytème d’intercommunications de bord.
- 3 filtres actifs passe-bande, centrés respectivement sur 300, 1300 et 3000 Hz. Ces trois fréquences correspondent aux modulations reçues lors des traversées des lobes de chaque balise MKR.
Chaque filtre actif injecte son signal dans un étage de commande, lequel allume un voyant dont la couleur correspond à la balise reçue.
Les voyants s’allument au rythme des modulations reçues (traits, point – traits, points). L’allumage de chaque voyant se fait en synchronisme avec les signaux audibles reçus et injectés dans l’intercommunication de bord.
Note
Une question revient souvent à la lecture de cette page : « pourquoi avoir choisi 90 et 150 Hz ?« …
Une première réponse pourrait-être « parce que !« . Pas très pédagogique me direz-vous 😆 Mais la littérature est pratiquement inexistante sur cette phase du développement de l’ILS. J’ai pu identifier 2 raisons plus ou moins probables :
- Les premiers développements ayant eu lieu entre les deux dernières guerres mondiales, il était courant d’utiliser des dispositifs électromécaniques pour générer des signaux sinusoïdaux périodiques (dynamotors, vibreurs, etc…). La fréquence du réseau de distribution d’énergie aux US étant de 60 Hz il était facile d’obtenir une sinusoïde à 30 Hz par ce moyen (dynamotor). Vous remarquerez que 30 Hz (la moitié de 60 Hz) a pour multiple 3 → 90 Hz, pour multiple 5 → 150 Hz et pour multiple 34 → 1020 Hz (audio d’identification). Ainsi en partant de la même référence on obtenait des signaux en relation de phase constante. Evidement de nos jours on génère des fréquences stables en partant d’horloges de très grande précision suivies par des chaînes de diviseurs. L’électromécanique a de moins en moins sa place sur de telles applications.
C’est une des explications que l’on trouve sur Internet. Personnellement j’estime que cela fait un peu légende urbaine et je n’ai jamais pu mettre la main sur un document authentique. - Deuxième possibilité : Le LOC doit émettre 3 informations, 90 Hz, 150 Hz, 1024 Hz. Il est donc indispensable de choisir ces fréquences de telle manière qu’elles aient le plus grand PPCM possible pour éviter des interférences mutuelles. Cela se vérifie par le calcul; le PPCM de (90 Hz, 150 Hz) = 450 Hz et le PPCM de (90, 150, 1020) = 15300. Ainsi il est plus facile de séparer ces fréquences à la réception pour en déduire la DDM (Différence De Modulation) 90/150 Hz. C’est aussi une des raisons pour laquelle on vérifie soigneusement le taux de distorsion harmonique des émetteurs lors de leur calibration annuelle.