
Le TACAN
 Encore un truc pour les militaires allez vous me dire; et vous aurez raison. À l’origine le TACAN a été inventé pour permettre le ralliement des aéronefs aux portes-avions de l’US NAVY.
Encore un truc pour les militaires allez vous me dire; et vous aurez raison. À l’origine le TACAN a été inventé pour permettre le ralliement des aéronefs aux portes-avions de l’US NAVY.
Sa précision, pour l’époque, l’a finalement fait adopter par presque tout ce qui vole, même les civils, c’est dire si ses qualités sont reconnues.
Comme beaucoup d’autres moyens de radionavigation, le TACAN a été développé au lendemain de la seconde guerre mondiale. Mais son impulsion définitive fut motivée par les besoins en radionavigation au cours de la guerre de Corée.
Ce standard mondial s’est finalement imposé dans toutes les armées modernes grâce à sa capacité de mise en oeuvre rapide et cela sous toutes les latitudes. Son heure de gloire s’est prolongée jusqu’à l’arrivée du GPS.
Avertissement : pour la compréhension des explications qui vont suivre, il est souhaitable que le lecteur soit familier des principes employés pour le D.M.E. Je recommande donc, au préalable, la lecture de la page consacrée à ce moyen de radionavigation.

Le TACAN (TACtical Air Navigation system) est un système de navigation principalement utilisé par les aéronefs militaires.
Ce système, d’origine américaine, fut initialement destiné aux porte-avions de l’U.S. Navy.
Le système est constitué de deux segments :
- Le segment Sol (la balise TACAN ou transpondeur), elle peut être également située sur un navire ou un avion ravitailleur.
- Le segment Air (l’interrogateur à bord de l’aéronef).
Le système fournit simultanément et en continu les informations suivantes :
Historique

Pendant la Seconde Guerre mondiale, les avions de la marine américaine étaient aidés pour le retour vers leurs porte-avions par un système homing. Fonctionnant en VHF, le homing produisait une identification de direction audio dans le casque du pilote. L’information de distance était obtenue seulement en estimant la force du signal.
La difficulté des pilotes devant rallier leur porte-avions vient du fait que ce dernier se déplace pendant que le pilote effectue sa mission. Comment donc déterminer les coordonnées de ce mobile pour le retour ?
Après la guerre, avec l’avènement de la navigation azimut-distance (rho-thêta) en survol terrestre, La marine envisagea d’utiliser un moyen similaire dans lequel un cadran à lecture directe dans le cockpit indiquerait la direction et la distance du porte-avions.
Une balise VOR terrestre a été essayée sur un navire. Les nombreuses réflexions dues aux superstructures du navire rendirent l’essai non concluant.
Sidney Pickles, qui dirigeait le département Rl-5 de Busignies, a proposé que la balise utilise le principe des lobes multiples avec une fréquence plus élevée. Dodington, qui dirigeait le département Rl-3, a proposé d’inclure également le DME. Les discussions avec la marine ont commencé en 1947 et, lors de la réception du premier contrat en juin 1948.
Le premier contrat avec la marine en 1948, prévoyait l’utilisation de porteuses pures (pour l’émetteur) à 1700 MHz. Cependant, le client, représenté par John Loeb du Bureau of Ships, comprit l’avantage d’en faire un système à impulsions fonctionnant dans la bande 960 -1215 MHz du DME, de sorte que l’information distance soit couplée à l’information azimut dans le même système.
Ce fut ajouté contractuellement en juin 1949.

Le premier test en vol d’un TACAN eut lieu le 17 janvier 1950 et une démonstration à la Navy eut lieu le 28 juin 1950. Comme la guerre de Corée venait de commencer, cette démonstration suscita un intérêt supérieur à la normale et à la fin de l’été 1950, la marine et l’armée de l’air britanniques ainsi que l’armée de l’air américaine avaient adopté le TACAN.
Cependant, il fut demandé que la précision du relèvement puisse être améliorée (en passant de 3 à 9 lobes), que la portée soit augmentée de 100 à 200 miles et le nombre de canaux augmenté de 51 à 126. Un seul de ces équipements répondant à ces nouvelles normes vola jusqu’au début de 1952. Une démonstration fut organisée du 18 au 21 février 1952 en présence du secrétaire de la Marine, Floberg du général Blake de l’US Air Force, ainsi que leurs états-majors.
À la fin de 1954, plus de 200 interrogateurs et 100 balises sol avaient été livrés, le TACAN était en passe de devenir une norme mondiale.
Une série supplémentaire de 10 000 appareils ARN-21, a ensuite été commandée. Et puis en 1958, 10 000 de plus. 600 balises URN-3 améliorées, appelées GRN-9, ont été commandées à Federal, Stromberg et Raytheon en 1957. À l’étranger, l’URN-3 a été fabriqué en Australie et au Japon, tandis que le GRN-9 a été fabriqué en France et en Allemagne. En Angleterre, la RAF a exigé un ARN-21 fabriqué à partir de pièces britanniques.
La balise britannique STURN-3 eut un peu plus de succès et a, par la suite, été fabriquée en Italie sous le nom de F-STURN-3.
Le programme militaire TACAN ayant manifestement porté ses fruits, la question fut de savoir que faire du DME. Un débat de deux ans fit rage de 1954 à 1956, au cours duquel Busignies a pris une part active à la promotion du concept de colocalisation des stations VOR et TACAN afin de fournir un système azimut-distance utilisable à la fois par les civils et les militaires. Ce qui est devenu VORTAC et a été adopté le 30 août 1956.
En 1982, environ 100 000 appareils TACAN aéroportés avaient été construits et environ 3 000 balises sol, représentant une valeur totale d’environ 1,5 milliards de dollars.
Principe du TACAN
L’étude du TACAN comporte deux parties : la fonction distance et la fonction azimut.
La fonction distance
Cette fonction est complètement identique à la fonction D.M.E. Le lecteur pourra donc se reporter à la page décrivant ce système de radionavigation.
Une petite différence cependant : à ses débuts le TACAN ne fonctionnait qu’en Mode X (paires d’impulsions séparées de 12 ); par la suite la capacité du mode Y (paires d’impulsions séparées de 36) lui été rajoutée.
); par la suite la capacité du mode Y (paires d’impulsions séparées de 36) lui été rajoutée.
La fonction azimut
La fonction azimut du TACAN s’appuie sur le principe du diagramme tournant similaire à celui employé dans le V.O.R. (la comparaison s’arrête là 😉 ).
 Tout comme dans le V.O.R. les balises TACAN (sol ou navire) rayonnent leurs signaux avec une antenne présentant un diagramme tournant dont les caractéristiques sont les suivantes :
Tout comme dans le V.O.R. les balises TACAN (sol ou navire) rayonnent leurs signaux avec une antenne présentant un diagramme tournant dont les caractéristiques sont les suivantes :
- la forme du diagramme de rayonnement est une conchoïde,
- sa vitesse de rotation est de 15 t/s,
- la rotation est dextrogyre (tournant à D).

Par conséquent, les impulsions de réponses de la balise TACAN seront affectées d’une modulation d’amplitude apparente à 15 Hz lors de le réception par l’interrogateur (aéronef).
De plus, la phase de cette modulation d’amplitude variera en fonction du QDM de l’interrogateur (voir planche ci-dessus).
Pour permettre à l’interrogateur de mesurer cette phase, une information de référence est transmise par la balise TACAN sous forme d’une série d’impulsions spécifiques et distinctes des impulsions de réponses permettant aux interrogateurs de calculer l’information distance.
L’instant d’émission de ces impulsions correspond au passage du maximum de la conchoïde à l’est magnétique, ce qui correspond à la dérivée positive maximum de la courbe d’amplitude des impulsions reçues par un aéronef se trouvant dans le sud magnétique (Sm) de la balise (la dérivée positive maximum est facile à détecter avec un circuit électronique). Ces impulsions spécifiques sont reçues par tous les interrogateurs à portée radio de la balise.


Il suffit donc, pour l’interrogateur, de mesurer le déphasage entre l’instant de réception des impulsions de référence et l’instant d’apparition de la dérivée positive maximum suivante du signal reçu (voir planche ci-dessus. Point vert pour QDM 90 , point bleu pour QDM 270).
, point bleu pour QDM 270).
L’évolution technologique des aériens TACAN a suivi les mêmes perfectionnements que ceux des VOR. Au début de son développement l’antenne était rotative, puis les éléments directeurs sont devenus statiques (voir le principe sur la page du VOR).
La seule différence par rapport aux principe des aériens du VOR réside dans la dimension : la longueur d’onde étant plus petite, la taille de l’aérien est proportionnellement plus petite.
Les impulsions de référence 15 Hz
À l’instant de l’émission des impulsions de référence, la balise TACAN émet un train de 12 paires d’impulsions :
- chaque impulsion a une durée de 3,5,
- les 2 impulsions d’une même paire sont espacées de 12.
- chaque paire est espacée de 30 de la précédente.
Ce train d’impulsion est émis une seule fois à chaque passage du maximum de la conchoïde à l’Est magnétique et, par conséquent, lorsque la dérivée positive maximum du champ rayonné est mesurable au Sud magnétique de la balise.

Ces impulsions sont reçues par tous les aéronefs au même instant et quelque soit leur QDM. Seule l’amplitude du signal à la réception dépend du QDM de chaque aéronef.
La mesure fine
La mesure du QDM détaillée aux paragraphes précédents donne une précision théorique de 1° de QDM pour 1° de déphasage. Pour pallier aux problèmes de réflexions sur les obstacles et perturbations des mesures de phases, une amélioration de la précision a été réalisée.
Sur-modulation du diagramme à 135 hz
Le diagramme de rayonnement amélioré présente 9 minimas et maximas successifs (1 tous les 40 °). Cette conchoïde déformée a l’aspect représenté dans la figure ci-dessous (à G). L’ensemble (diagramme 15 Hz + diagramme 135 Hz) est toujours animé d’un mouvement de rotation uniforme à 15 t/s.

La variation d’amplitude apparente des impulsions de réponse présentent une modulation à 15 Hz, surmodulée par du 135 Hz (15 x 9 = 135). Voir figure ci-dessus, à D.
Les deux modulations restent rigoureusement synchronisées en phase de telle manière que le point de référence principal corresponde exactement avec le point de référence secondaire.
Ainsi la variation des amplitudes reçues présentent 9 points de dérivées positives maximum par période de 15 Hz (66,7 ms).
En l’absence d’harmoniques (cas théorique) la modulation d’amplitude (courbe enveloppe) des impulsions reçues est définie ainsi :

Avec :

 : Pulsation de la rotation du diagramme (15 Hz)
: Pulsation de la rotation du diagramme (15 Hz) : écart de phase entre le 15 Hz et les impulsions de référence principales (< 0,3 °)
: écart de phase entre le 15 Hz et les impulsions de référence principales (< 0,3 °) : écart de phase entre le 135 Hz et les impulsions de référence secondaires (< 0,3 °)
: écart de phase entre le 135 Hz et les impulsions de référence secondaires (< 0,3 °) : QDM
: QDM : temps de correction depuis les impulsions de référence (principales ou secondaires)
: temps de correction depuis les impulsions de référence (principales ou secondaires)
Le graphe ci-dessous représente la fonction f(t) de ce signal composite.

Chaque cycle de 135 Hz représente donc une « fenêtre » de 40° dans laquelle l’interrogateur peut rechercher plus finement, et donc avec plus de précision, le QDM.
Les impulsions de référence 135 Hz
Lorsque chaque point de dérivée positive maximum se présente au Sud magnétique de la balise, cette dernière émet un train d’impulsions de référence secondaires constitué de 6 paires d’impulsions :
- chaque impulsion a une durée de 3,5 ,
- les 2 impulsions d’une même paire sont espacées de 12 .
- chaque paire est espacée de 24 de la précédente.

Lorsque la conchoïde principale est orientée à l’est (et le point de dérivée positive maximum principal orienté au sud magnétique), seules les impulsions de référence principales sont émises (ce point étant confondu avec un point de référence secondaire).
Les impulsions de référence secondaires seront émises lorsque les autres points de dérivée positive maxi. se présenteront au sud magnétique de la balise.
La mesure de phase s’effectue de la même manière que pour les impulsions de référence principales, en mesurant le déphasage entre l’émission des impulsions de référence secondaires et la réception de la dérivée positive maximum pour l’amplitude des impulsions de réponse.
Pour lever le doute (il y a apparition de 9 points de dérivées positives maximum), un phasemètre de mesure détermine le secteur à 40° devant être pris en compte à partir des impulsions de référence principale et de la variation d’amplitude des impulsions de réponse à 15 Hz.
Avec l’utilisation de ce principe, l’incertitude absolue (théorique) de la mesure d’azimut en TACAN est de 1/9 de degré.
La plupart des TACAN modernes sont spécifiés ainsi :
 à 3,47 km en azimut,
à 3,47 km en azimut, NM (926 m) en distance ou 3% de la distance oblique.
NM (926 m) en distance ou 3% de la distance oblique.
Les impulsions de remplissage
Afin d’éviter que la balise n’émette trop peu de réponses lorsque un nombre insuffisant d’aéronefs l’interrogent (ce qui empêcherait le calcul de la distance et de l’azimut), les balises TACAN émettent des impulsions de remplissage (ou squitter) tout comme avec le DME. Ainsi un nombre suffisant d’impulsions de référence et de réponses sont émises et permettent à un minimum d’interrogateurs d’effectuer leur mesures.
Avantage supplémentaire : les émetteurs de la balise travaillent à charge constante, environ 2700 à 3000 impulsions par seconde.
Synoptiques de principe
Bien que similaires au DME, les tanspondeurs TACAN présentent la particularité d’émettre selon un diagramme tournant. La réalisation de ce dernier exige tout d’abord quelques artifices techniques utilisés dans les antennes directives mécaniques, lesquelles évoluent ensuite vers des dispositifs statiques, dès lors que la technologie des composants le permet.
Principe des antennes TACAN
Pour rayonner le diagramme décrit dans les paragraphes ci-dessus, les transpondeurs TACAN furent tout d’abord dotés d’antennes à rotation mécanique.
Le principe d’une antenne à rotation mécanique consiste à bâtir un ensemble de brins réflecteurs et directeurs rotatifs, disposés autour de l’antenne rayonnante.
Ainsi, dans la figure ci-dessous, deux tambours coaxiaux et mécaniquement solidaires sont animés d’un mouvement de rotation à 900 t/mn.
- Le brin rayonnant est alimenté par l’émetteur du transpondeur.
- Le brin réflecteur (il y en a qu’un seul) positionné sur le tambour rotatif intérieur crée, avec le brin radiateur, un diagramme tournant en forme de conchoïde tournant à 900/60 = 15 t/mn soit 15 Hz.
- Le tambour extérieur reçoit 9 brins directeurs espacés de 40°. Ils modifient le diagramme en forme de conchoïde pour donner le diagramme décrit dans le principe du TACAN. Sa rotation étant de 900 t/mn (il est solidaire du tambour intérieur), les 9 brins créent une modulation d’amplitude apparente de 9 x 40° -> 8100 cycles / mn soit 8100 / 60 = 135 cycles/secondes.

Ce dispositif mécanique, hormis les problèmes de fiabilité inhérents, nécessitait un asservissement mécanique rigoureux afin de garantir les performances du TACAN.
La progression des technologies « Solid-State » permit de réaliser des aériens statiques.
La figure ci-dessous présente l’intérieur d’une telle antenne. Le radôme installé par dessus la fait ressembler à un OVNI, inspirant de nombreux sites aux thèses conspirationnistes 😀 .

Son principe de fonctionnement utilise la propriété des brins directeurs et réflecteurs pour modifier le diagramme de rayonnement d’une antenne (le radiateur); alternativement commutés à l’aide de diodes PIN les brins modifient le diagramme de rayonnement l’animant d’un mouvement de rotation.
- Un premier réseau de brins directeurs, mais aussi de réflecteurs commutés en phase, crée le diagramme rotatif en forme de conchoïde. Sa vitesse de rotation est de 900 t/mn ce qui donne une modulation d’amplitude apparente (pour un observateur fixe) de 15 Hz. La phase dépendant du QDM comme décrit précédemment.
- Un deuxième réseau composé de brins directeurs et de réflecteurs, commutés en phase et animés du même mouvement de rotation que le premier réseau de brins, crée une sur-modulation apparente de 135 Hz (pour un observateur fixe).
Synoptique de principe d’un transpondeur
L’information distance
Le cœur du transpondeur TACAN est très similaire à celui du DME :
- Les interrogations reçues par l’élément radiateur de l’antenne sont injectées dans un récepteur via un circulateur et décodées (1).
- Elles sont ensuite traitées pour élaborer les impulsions de réponses (2) et, éventuellement, de remplissage.
- Un étage oscillateur fournit l’indicatif de la balise en morse toutes les 30 secondes avec une tonalité de 1350 Hz.
- Les impulsions de réponses commandent un étage modulateur lequel pilote un émetteur (3).
- Via le circulateur, les impulsions de réponses sont rayonnées par l’élément radiateur de l’antenne.
Ainsi l’information distance du TACAN est entièrement compatible avec les signaux définis pour le DME.
L’information azimut
C’est en commutant les éléments de l’antenne statique, décrite ci-dessus, que l’on obtient un diagramme tournant conforme aux spécifications du TACAN :
- Deux étages de commande (4) pilotent les circuits de commutation pour chaque chaîne (15 Hz & 135 Hz)
- Pour chaque chaîne, un étage de commutation (5 & 6) commande les diodes PIN de chaque élément, le faisant successivement passer de l’état de directeur à celui de réflecteur, animant ainsi le diagramme de rayonnement de l’antenne d’un mouvement tournant.
- Le réseau circulaire comprenant les éléments au plus près du radiateur créent une conchoïde tournant à 15 Hz.
- Le réseau circulaire comprenant les éléments au plus loin du radiateur créent une surmodulation apparente de 135 Hz. Il tourne cependant en phase et à la même vitesse que la conchoïde.
- Chaque étage de commande (4) déclenche l’émission des impulsions de référence au moment où le diagramme d’émission rayonné présente une dérivée positive maximum au sud magnétique. Les impulsions de référence sont introduites dans l’étage de traitement / codage (2) où elles remplacent les impulsions de réponses ou de remplissage.
Synoptique d’un interrogateur
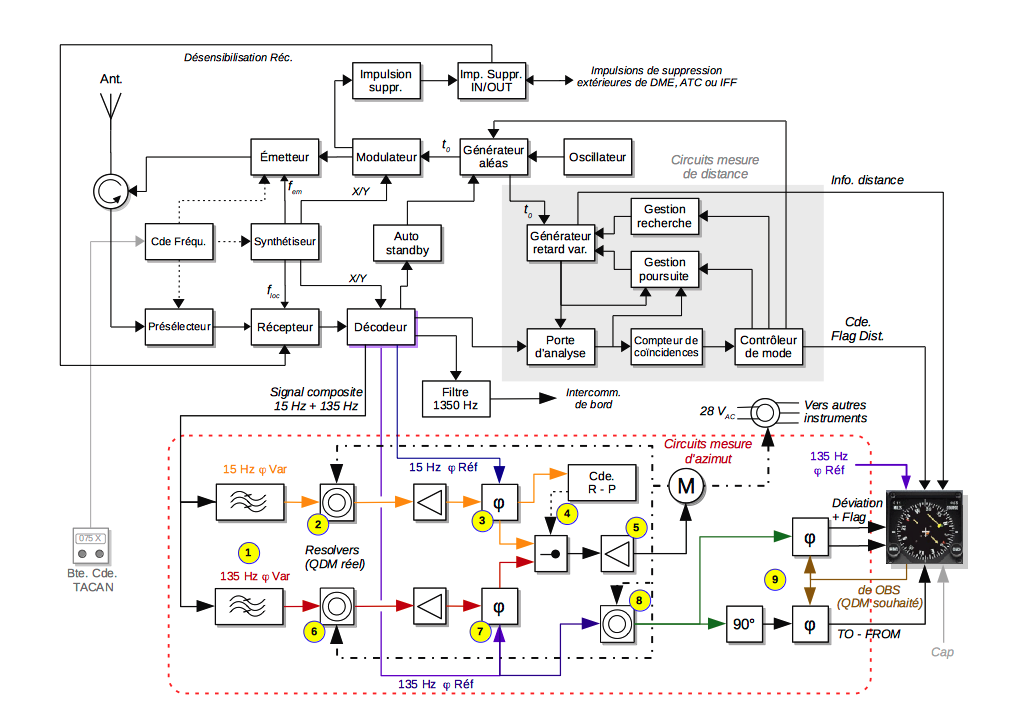
Dans la partie supérieure du schéma ci-dessus on reconnaît l’architecture d’un interrogateur DME fournissant l’information distance au HSI.
Rien de nouveau donc si ce n’est un étage décodeur un peu plus sophistiqué que dans le DME. En effet, en plus de décoder les impulsions de réponses du transpondeur TACAN, il détecte :
- la variation d’amplitude des impulsions de réponses (signal composite 15 Hz + 135 Hz).
- les impulsions de référence (15 Hz et 135 Hz).
Le circuit de mesure de l’azimut
Le circuit de mesure de l’azimut (entouré de pointillés rouges dans le schéma ci-dessus) assure le traitement des informations transmises par l’étage décodeur.
Le signal composite (15 Hz + 135 Hz dont les phases sont variables en fonction du QDM) est appliqué à l’entrée de deux filtres actifs (1) lesquels assurent la séparation de chaque fréquence.
La chaîne 15 Hz
Le 15 Hz phase variable est appliqué à l’entrée d’un résolver (2) lui même couplé à un amplificateur sommateur. L’ensemble se comporte comme un déphaseur variable (le déphasage étant fonction de l’angle du résolver).
Un comparateur de phase élabore un signal d’erreur proportionnel au déphasage entre 15 Hz phase variable et le 15 Hz phase de référence (3).
Le signal d’erreur est appliqué à un servo-moteur (5) qui commande la rotation des résolveurs. Le moteur est actionné de telle manière que la boucle d’asservissement cherche à amener en coïncidence le 15 Hz phase variable (déphasé par le résolver) (2) et le 15 Hz phase de référence.
A cet instant les résolveurs sont dans une position angulaire proche du QDM. Cet asservissement étant trop grossier, un étage de commande recherche – poursuite commute une porte (4) assurant le transfert de l’asservissement sur la chaîne 135 Hz.
La fenêtre de basculement de la porte correspond à un déphasage de  soit un cycle de 135 Hz phase variable exactement.
soit un cycle de 135 Hz phase variable exactement.
Cette chaîne est parfois appelée « chaîne recherche » (search).

(course & miles)
La chaîne 135 Hz
De la même manière que pour la chaîne 15 Hz, l’asservissement cherche une mise en coïncidence du 135 Hz phase variable (déphasé par le résolver) (6) et le 135 Hz phase de référence.
Le comparateur de phase de la chaîne (7) élabore la tension d’asservissement du moteur, lequel assure la poursuite (track) de la valeur du QDM selon les évolutions de l’aéronef. On a ainsi un asservissement beaucoup plus précis, car la dynamique du comparateur de phase (7) permet d’asservir le moteur et les résolveurs sur une plage 40 (0,698 rad) et non plus 360 (6,283 rad).
Cette chaîne est parfois appelée « chaîne poursuite » (track).
Pendant la phase de poursuite, la chaîne 15 Hz surveille en permanence le déphasage de sorte qu’il ne sorte pas de la fenêtre .
Si une telle situation se produisait, l’étage de commande recherche – poursuite basculerai à nouveau la porte vers la chaîne 15 Hz, et une phase de recherche se déclencherai jusqu’à trouver un nouvel asservissement satisfaisant.
Les circuits aiguille, TO – FROM – Flag
Le signal 135 Hz phase de référence est injecté dans l’OBS du HSI, ce dernier affichant les données du TACAN.
Selon le QDM sélectionné par l’opérateur (bouton course), ce signal sera déphasé proportionnellement à ce réglage.
Le signal 135 Hz phase de référence est également appliqué à l’entrée d’un résolver (8) où il est déphasé d’un angle égal au QDM vrai, le résolver étant commandé par le même moteur que les autres (2) et (6).
Le signal 135 Hz phase de référence déphasé par l’OBS et le 135 Hz phase de référence (après résolver) sont introduits dans un comparateur de phase qui commande la déviation de l’aiguille D/G.
Nous sommes donc en présence de deux signaux :
- l’un portant l’information QDM vrai (135 Hz phase de référence (après résolver)
- l’autre signal portant l’information QDM souhaité (135 Hz phase de référence déphasé par l’OBS).
Tant que ces deux signaux ne sont pas rigoureusement en phase l’aiguille dévie à D ou à G. L’équilibre n’est atteint que lorsque QDM vrai et QDM sélectionné (course) sont identiques. La déviation totale (à D ou à G) de l’aiguille équivaut à une différence de QDM de  .
.
Lorsque le déphasage est trop important, le comparateur de phase commande l’apparition du drapeau d’alarme azimut (Flag).
À l’instar du VOR, le 135 Hz phase de référence (après résolver) est déphasé de 90 degrés puis comparé en phase avec le signal 135 Hz phase de référence déphasé par l’OBS. La sortie de ce dernier commande le drapeau TO – FROM.
Ces quelques liens vous expliquent l’utilisation du TACAN ici (lien mort) et ici.
Evolution de l’architecture
Le principe décrit ci-dessus est celui employé dans les premiers TACAN. L’arrivée des bus digitaux (ARINC-429, MIL-1553) et des techniques numériques ont complètement modifié les architectures.
Les interrogateurs modernes, s’ils gardent toujours les mêmes circuits émission-réception-modulation, voient leurs synoptique fortement simplifiées car, dès la détection, les signaux sont numérisés et traités par de puissants algorithmes.
Ainsi les interfaces avec les différents périphériques (boîtes de Cde., indicateurs, calculateurs divers), qu’elles soient numériques ou analogiques, fonctionnent sous le contrôle de calculateurs intégrés dans les équipements de bord.
Le TACAN en conditions opérationnelles
En utilisation militaire le principal inconvénient du TACAN est son manque de furtivité. En effet il suffit à un ennemi d’interroger la balise TACAN d’un porte-avions pour connaître sa position et ainsi être en capacité de mener facilement une attaque.
Une procédure consistait alors à utiliser l’émission de la balise « à la demande » :
- Situation initiale : le transpondeur (la balise navire) et l’interrogateur (aéronef) sont en mode « Stand-by ».
- L’opérateur prend contact avec le porte-avions via une liaison radio et demande l’émission de la balise, puis il mets l’interrogateur bord en mode actif. Les impulsions d’interrogation sont alors émises.
- L’opérateur à bord du navire mets le transpondeur (la balise) en mode réponses. Interrogateur et transpondeur sont à même d’échanger leurs données et l’opérateur à bord de l’aéronef peut lire la distance et l’azimut du navire.
- Eventuellement, l’opérateur entre les coordonnées du but (le porte-avions) dans le calculateur de navigation.
- Quelques secondes après, transpondeur et interrogateur sont à nouveau basculés en mode « Stand-by ».
Nota : cette procédure explique la motivation de la commande Stanby sur les boîtes de commande des interrogateurs (Arrêt : l’interrogateur est hors service; Stanby : l’interrogateur est prêt à émettre des interrogations sans délai).
Compte tenu des moyens d’interception en guerre électronique moderne, cette procédure n’est plus efficace. On lui préfère un échange de coordonnées GPS ou GALILEO via une liaison chiffrée (p. ex.: sauts de fréquence, liaison 16, liaison 22) assurant de meilleures protections.
Références :
- Part of the TACAN theory – S.H. Dodington
- Les moyens de radionavigation – Ecole Militaire de l’Air – CDT Lecocq.
- École de chasse C6 – Orientation et Navigation TACAN (V2.0).
- MIL-STD-219C.
- TECHNICAL DOCUMENTARY REPORT NO. ESD-T DR-64-548 – 1964.
- SOLID STATE TACAN RECEIVER-CODER TECHNICAL DOCUMENTARY REPORT NO. ESD-TDR-64- 235 – 1964