
PCM, PPM, PWM & compagnie
Une page pour mettre les idées au clair destinée à ceux qui ne seraient pas familiers de tous ces acronymes. Ici nous allons voir les différents signaux qui sont utilisés par toute la chaîne de radio commande dans le monde du modélisme.
Cette page s’adresse aux novices pour qui le jargon utilisé ne leur est pas familier. une fois ces quelques notions de base acquises je leur conseille de visiter les pages de P. Kauffmann pour approfondir leur maîtrise de ce domaine.
Les signaux à l’émission (cas du PPM)
Le synoptique général ci-dessous représente les différents étages constituant un émetteur de radio commande.
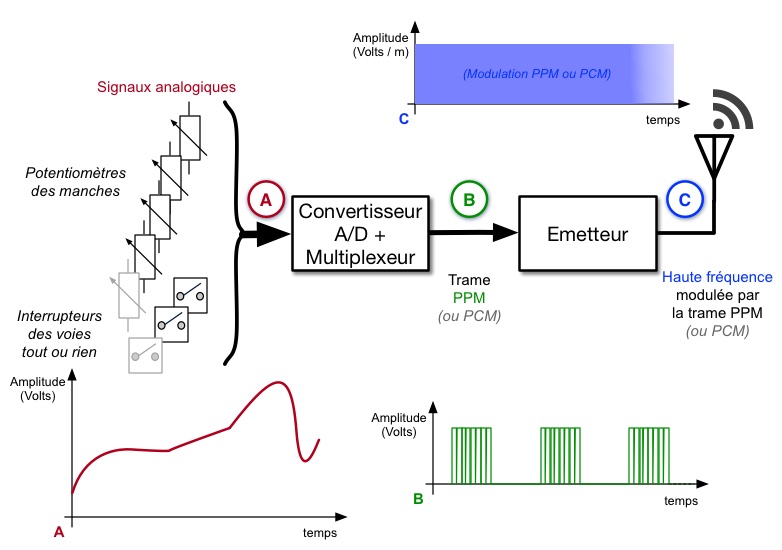 Au départ de la chaîne émission se trouvent l’interface Homme-Machine (IHM) constituée des différents manches des joysticks et des interrupteurs pour les commandes tout ou rien. Ces signaux sont considérés comme analogiques [A] car les tensions issues des potentiomètres ou des interrupteurs sont converties en valeurs numériques (conversion Analogique / Digitale).
Au départ de la chaîne émission se trouvent l’interface Homme-Machine (IHM) constituée des différents manches des joysticks et des interrupteurs pour les commandes tout ou rien. Ces signaux sont considérés comme analogiques [A] car les tensions issues des potentiomètres ou des interrupteurs sont converties en valeurs numériques (conversion Analogique / Digitale).
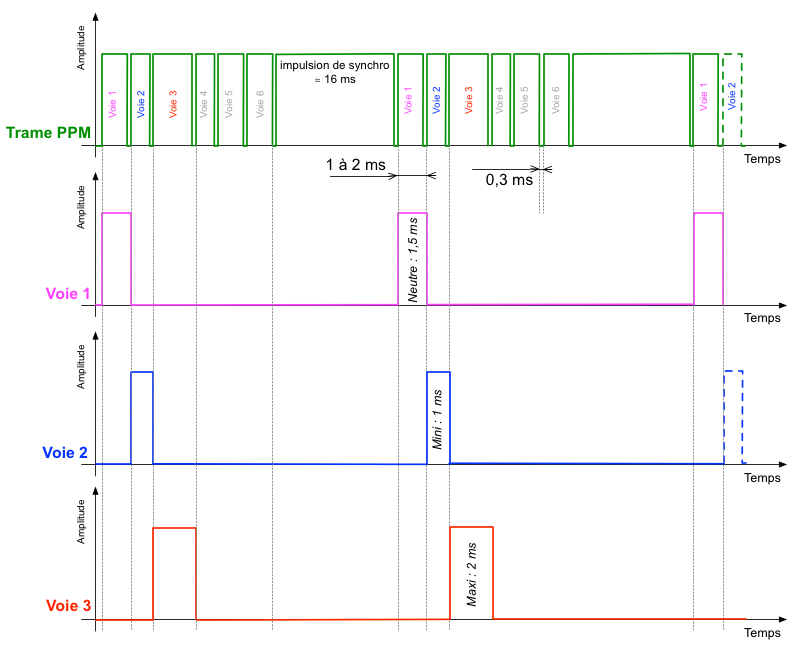
La trame PPM
Chacune de ces informations est ensuite convertie en une impulsion de durée variable qui est proportionnelle à sa valeur analogique. Le standard actuel est compris entre 1 et 2 ms, avec un neutre à 1,5 ms (certains fabricants ont leur propres standard). Cette durée se comprend de front positif à front positif du signal. Les voies tout ou rien sont traitées de la même manière sauf que les impulsions ne possèdent que 2 durées 1 ou 2 ms; la notion de neutre n’existant pas dans ce cas.
Dans un ordre précis, chacune de ces impulsions (de durée variable) est introduite dans un multiplexeur qui fabrique une trame d’impulsions, chacune étant séparée par un intervalle de 300 µs (valeur standard). une fois toutes les impulsions multiplexées un silence d’environ 16 à 20 ms. est respecté avant la production d’une nouvelle trame contenant les même informations que la précédente, mais mises à jour pour suivre les changements de commandes du pilote.
Cette trame est dite trame PPM (Pulse Position Modulation) [B]. Tel quel, cette trame ne peut être émise. Pour cela elle est transmise à l’étage modulateur d’un émetteur.
A ce stade plusieurs types de modulations sont utilisées :
- Aux temps historiques de la radio commande les émetteurs étaient modulés en amplitude (AM). Cette modulation rendait les récepteurs trop sensibles aux diverses perturbations. Elle a été rapidement abandonnée dès que les composants électroniques adaptés (et économiques) furent disponibles.
- Dans les bandes de fréquence 41 et 72 MHz la trame PPM module en fréquence (FM) la fréquence émise. (je ne parle pas des bandes 144 et 432 MHz).
- Avec l’apparition des radiocommandes en 2,4 GHz des modulations intéressantes sont apparues permettant une transmission en spectre étalé.
La modulation de fréquence
Le signal radioélectrique émis et rayonné par un émetteur est de la forme  , pour le moduler en fréquence (ou en phase) il suffit de faire varier
, pour le moduler en fréquence (ou en phase) il suffit de faire varier  (ou
(ou  ) selon le signal PPM.
) selon le signal PPM.
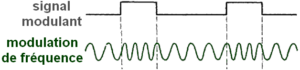
La figure ci-contre schématise le principe de la modulation de fréquence par les impulsions de la trame PPM.
Bien entendu le récepteur devra être élaboré pour détecter ce type de signal…
En modulation de fréquence (FM) le risque que deux amateurs mettent leur émetteur en fonctionnement sur la même fréquence existe : les interférences alors produites risquent de faire perdre le contrôle d’un ou des deux modèles radiocommandés. C’est pour cela que sur le bord des terrains se trouvait un panneau des canaux sur lequel chaque participant prenait une marque unique avant d’émettre. Ainsi un autre participant ne risquait pas par inadvertance de mettre son émetteur en fonctionnement. Un discipline de terrain existait réellement. (je sais, le mot discipline fait vieux jeu de nos jours…)
La longueur d’une trame PPM
Il est évident que la fréquence à laquelle les trames sont émises influencent directement le nombre de fois que les servos du récepteur seront mis à jour (on appelle cela la latence). Faire des trames avec de nombreuses voies revient à augmenter le temps de latence et donc diminuer la fréquence de rafraîchissement des servos. Yaka faire des impulsions plus courtes me direz vous; ce que certains fabricants ont fait. Mail il y a une limite que la physique impose à ce principe : plus les impulsions sont de durée courte, plus elles sont composées d’harmoniques impaires (des multiples de la fréquence fondamentale des impulsions) et plus le spectre émis en FM est riche (voir les fonctions de Bessel) et plus le risque d’avoir des bandes latérales émises dans le canal voisin est grand. Tout a donc une limite.
Citation : « Deux choses sont infinies : l’univers et la bêtise humaine ; mais en ce qui concerne l’univers, je n’en ai pas encore acquis la certitude absolue. » (Einstein).
L’émission en spectre étalé
Développé par les militaires vers les années 1970, les émissions en spectre étalé ont pour propriétés de repousser les brouillages éventuels, d’émettre à plusieurs sur la même bande de fréquences et d’assurer un certain degré de secret. Un exemple parfait de l’émission en spectre étalé est le G.P.S. dont on sait que la constellation de satellites émet sur la même fréquence sans aucune perturbation de chaque liaison. Un autre exemple connu de tous est l’émission des « box » en WiFi : tout le monde utilise la même bande de fréquences et personne ne se gêne ni ne pénètre le réseau de son voisin. Il est temps de passer au principe général. Deux principes d’émission en spectre étalé existent :
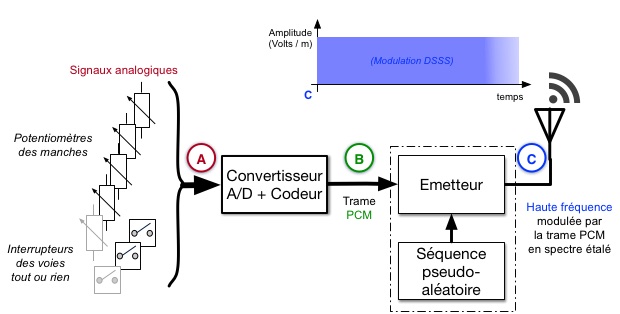
- Le DSSS (Direct Sequence Spread Spectrum) qui consiste à émettre la trame PPM (ou PCM) mélangée avec un signal pseudo-aléatoire. Ainsi on étale le spectre émis dans toute ou partie de la bande d’émission. Bien entendu le déchiffrage à la réception n’est possible que si la séquence pseudo-aléatoire est connue du récepteur. Ce mode permet d’émettre à plusieurs dans la même bande de fréquences sans se perturber mutuellement; à condition de ne pas utiliser la même séquence pseudo-aléatoire bien sûr 😉
- Le FHSS (Frequency-Hopping Spread Spectrum) Le saut de fréquence (en bon français) consiste à émettre en changeant de canal d’émission de manière pseudo-aléatoire et suffisamment rapidement pour échapper à un brouillage (volontaire ou non). Bien entendu, ici aussi l’émetteur et le récepteur doivent utiliser la même séquence pseudo-aléatoire. Les origines de cette invention remontent à la deuxième guerre mondiale. Elle est le fruit d’une célèbre actrice Hedy Lamarr et de George Antheil en 1941.
La réalisation de modules émetteurs selon ces techniques est hors de portée de l’amateur ordinaire. Il est donc fait usage de modules émission du commerce dans les réalisations personnelles pour les émetteurs de radio commande.
L’usage du spectre étalé, particulièrement le DSSS, se prête particulièrement bien à l’émission de séquences numériques. C’est pourquoi des trames plus sophistiquées que le PPM sont utilisées, permettant une foule de fonctions jusque là difficiles à implémenter.
Les signaux à l’émission (cas du PCM)
Dans le cas du PCM la trame n’est plus constituée d’une suite d’impulsions de largeur variable, mais d’une suite d’octets codant en numérique la position de chaque commande du pupitre de l’émetteur. Ainsi toute donnée analogique d’entrée est numérisée dans un codeur (voir figure ci-dessus) et donc toute source de perturbation peut ensuite être détectée, voir corrigée.
Il n’existe pas de trame PCM standard car chaque fabricant y est allé de sa solution; ce qui rend plus ou moins incompatibles les récepteurs de marques différentes. La figure ci-dessous vous démontre la multiplicité des différents codages selon les fabricants, et je ne parle pas des versions.
Ne me demandez pas une table de compatibilité entre codage et récepteurs…
Transmission numérique oblige nous n’assistons plus à une simple liaison simplex, mais à une liaison duplex permettant un retour d’informations du mobile vers le pilote. Variomètres, altimètres, mesures des tensions batteries, etc sont désormais possible dans la même liaison radio. Pour les raisons évoquées précédemment, la montée en fréquence des équipements vers le 2,4 GHz ainsi que le type de modulation permettent la transmission de signaux plus rapides et plus nombreux, mais au prix d’une complexification technique sans cesse plus grande et, heureusement, d’une miniaturisation toujours plus poussée.
Les signaux à la réception
Qu’ils soient PPM ou PCM le début d’une chaîne de réception est à peu prés toujours la même : un récepteur superhétérodyne à simple ou double changement de fréquence. Le synoptique général ci-dessous représente à la fois les étages utilisés pour recevoir la FM ou un spectre étalé.
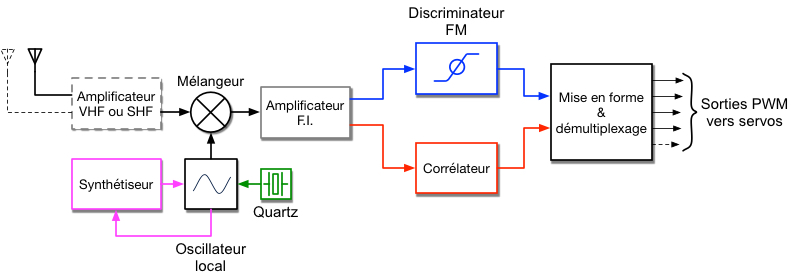
Les récepteurs possèdent une ou deux antennes. Lorsqu’ils fonctionnent en SHF (2,4 GHz) les antennes peuvent être sujettes à des masquage de signaux ou des trajets multiples car la longueur d’onde utilisée est très courte. Pour pallier cette éventualité certains récepteurs sont équipés de deux antennes qu’il convient de positionner à 90° l’une de l’autre.
Suivant la gamme de fréquence utilisée, il est parfois nécessaire d’effectuer une amplification sélective du signal reçu. On utilise pour cela des amplificateurs accordés sur la game de fréquences à recevoir. Cette sélectivité permet d’éliminer un certain nombre de fréquences indésirables.
Vient ensuite un étage mélangeur qui effectue la transposition du spectre reçu vers la fréquence d’un amplificateur plus sélectif que l’on nomme amplificateur de fréquence intermédiaire (FI). Pour effectuer cette transposition le mélangeur reçoit un signal venant d’un oscillateur local. la fréquence de cet oscillateur est réglée de telle manière que  ou parfois
ou parfois  .
.
avec :
 : fréquence à recevoir,
: fréquence à recevoir, : fréquence de l’oscillateur local,
: fréquence de l’oscillateur local, : fréquence d’accord (fixe) de l’amplificateur FI.
: fréquence d’accord (fixe) de l’amplificateur FI.
L’oscillateur local peut être piloté de deux manières différentes :
- Par quartz; le changement de canal devant alors se faire par changement du quartz (partie verte du synoptique).
- Par le principe de la synthèse de fréquences; tous les canaux prévus dans la bande de fréquences sont alors utilisables sans changement de composant (partie violette du synoptique).
Les récepteurs de dernière génération (et un peu avant) sont pilotés par synthèse de fréquence. Dans les télécommandes fonctionnant en étalement de spectre, un échange des données s’effectue entre l’émetteur et le récepteur lors de la phase de « Binding ».
Après l’amplification par la FI et suivant la modulation employée l’extraction des données se fait de deux manières différentes:
- Par un discriminateur de fréquence (bleu) qui démodule la trame PPM transmise.
- Par un corrélateur (rouge) qui extrait la trame PPM ou PCM à partir de la séquence pseudo-aléatoire également échangée entre l’émetteur et le récepteur lors de la phase de Binding.
Une fois la trame PPM ou PCM extraite, elle est mise en forme et démultiplexée pour être ensuite distribuée sous forme de signal PWM à chaque servo.
Les impulsions PWM
Nous voici rendus à la fin de la chaîne de télécommande. Les impulsions PWM (Pulse Width Modulation), en français Impulsions à modulation de largeur sortant du démultiplexeur sont envoyées aux servos dits analogiques. Chaque voie est ainsi distribuée à chaque servo qui lui est attribué (et raccordé). Suivant les ordres du pilote ces impulsions voient leur largeur (durée) varier. Le servo compare cette impulsion avec son neutre de référence, il en élabore des ordres d’écartométrie qui sont ensuite utilisés pour manoeuvrer l’axe du servo et les accessoires qui y sont montés.
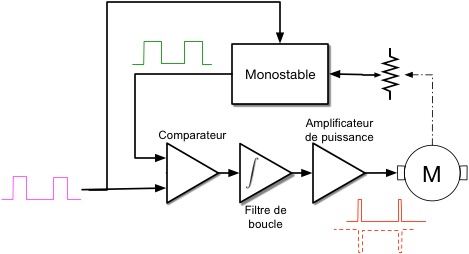
L’utilisation des impulsions PWM est assez simple : les impulsions PWM sont envoyées vers le servo (violet). Elle déclenchent un monostable dont sa période est ajustée par un potentiomètre, lui même commandé par un moteur.
Les impulsions fournies par le monostable sont comparées à celles venant du récepteur. Si une différence de durée est constatée, le comparateur fournit des impulsions d’erreur (positives ou négatives suivant le sens de l’erreur).
Les impulsions d’erreur passent dans un filtre de boucle dont le rôle est d’éviter que le servo « pompe », c’est à dire qu’il se mette à osciller de part et d’autre de sa position d’équilibre (voir critère de Nyquist).
Une fois pondéré par le filtre de boucle, le signal d’erreur est amplifié pour commander le moteur, lequel entraîne le potentiomètre, ce qui a pour conséquence de modifier la période du monostable.
Arrivée à la position d’équilibre les impulsions du monostable sont de durée identique aux impulsions PWM, le moteur s’arrête car il n’y a plus de signal d’erreur, le servo est dans la bonne position…. jusqu’au prochain changement de durée de l’impulsion PWM.
Le SBUS
Nous avons vu que l’apparition des trames PCM permettait de transmettre un grand nombre de voies. A ce jour des radiocommandes à 16 voies sont des produits courants. Seulement qui dit 16 voies dit 16 connecteurs sur le récepteur; ce qui impacte très fortement la miniaturisation.
C’est pour cela que les récepteurs (pas tous) proposent une sortie dite S-BUS au lieu de plusieurs PWM. Le modéliste peut ainsi installer un grand nombre de servos en les reliant tous sur le même bus (3 fils : 1 signal, 1 Vcc, 1 Masse). Le câblage dans le modèle réduit en est simplifié.
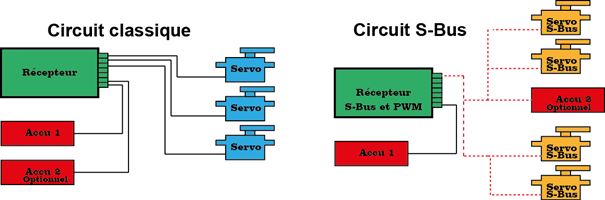
Plus question de PWM, les données numériques destinées à chaque servo cheminent sur le même bus, à chaque servo de reconnaître les données qui lui sont destinées. C’est pour cela que chaque servo doit être configuré pour qu’il reconnaisse la voie qui lui est destinée (un bazar de plus a acheter 🙂 ).
Ces servos sont dits servos numériques. A ce jour je n’ai pas d’information sur la structure des trames du SBUS, et en plus chaque fabricant y va de sa propre spécification…
Le S-BUS Futaba
Initialement créé par Futaba le S-BUS (protocole propriétaire) est le premier ayant ouvert la voie à ce type de transmission d’ordres aux servos. Depuis quelques autres fabricants s’y sont mis mais toujours avec leur propre solution.
Voici donc la trame S-BUS Futaba :
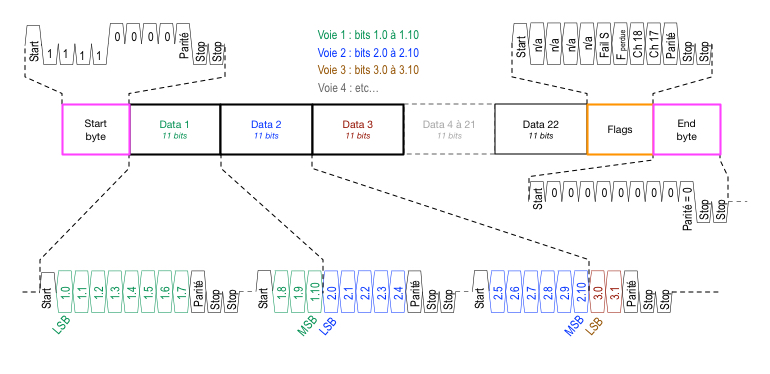
La trame S-BUS est constituée de 25 Bytes. Chaque Byte est constitué de 1 bit de début, 8 bits de données, 1 bit de parité et 2 bits de stop. La transmission s’effectue à 100 kbits/s. Chaque trame est émise toutes les 14 ms (en mode dit analogique) ou 7 ms en mode haute vitesse. La logique est inversée (pourquoi faire simple ?).
Le premier Byte signale le début de la trame. Sa valeur est 11110000b (0xF0).
Viennent ensuite les Bytes de données (1 à 22). Ils sont destinés à transporter les voies, lesquelles sont codées sur 11 bits (oui, oui).
Comme un Byte ne peut transporter que 8 bits, la fin chaque mot de 11 bits est déporté dans le Byte suivant. Ainsi de suite j.q. Byte 22.
Faisant suite le Byte contenant les drapeaux. Les 4 premiers bits sont inutilisés.
Le bit 5 indique le « FailSafe ».
Le bit 6 indique la perte de liaison.
 Les bits 7 et 8 transmettent des ordres binaires.
Les bits 7 et 8 transmettent des ordres binaires.
Le Byte 25 signale la fin de la trame S-BUS. Sa valeur est 00000000b.
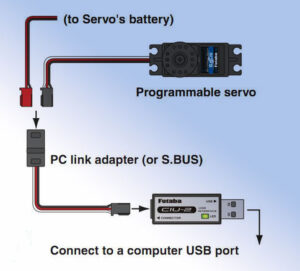
La programmation des servos se fait à l’aide d’un adaptateur USB – S-BUS et d’une application., d’un boîtier spécialisé ou de certains émetteurs (de la marque et haut de gamme).
Mon avis
Il faut bien commencer par quelque chose. Futaba a le mérite d’avoir ouvert la voie à ce type de transmission dont les avantages se ressentent surtout dans le maquettage de l’électronique. Mais on reste sur sa faim. Le bus est unidirectionnel, c’est à dire que le seul sens de communication est Récepteur → Servos. On aurait aimé un bus bidirectionnel permettant de transmettre au récepteur (qui en fait est un émetteur-récepteur duplex) des informations comme celles du variomètre, du badin, de la tension batterie, etc…
Peut-être une évolution à venir ?
Les autres protocoles S-BUS
Dès que j’en saurai plus je complèterai cette page…
Références
- Fondements techniques de la Radiocommande – P. Kauffmann (F4BWZ)
- PCM ou PPM pour nos modèles réduits – S. Laforest, traduit de l’allemand P. Rother